(534.5kb.)
사용 가능한 파일(1):
| 1. 문서 | 535kb. | 16.11.2011 08:22 |
1. 문서
전기. Compass의 버전 그리기: Korenchuk Ivan
제어 프로그램 개발을 위한 기본 원칙
CNC 장비용
프로그램 구성을 위한 일반 원칙
CNC 장비는 영숫자 코드로 지정된 프로그램을 사용하는 제어로 이해됩니다.
CNC 기계에서 처리할 때 도구는 프로그램에 지정된 경로를 따라 이동합니다.
이 경우 예를 들어 선반의 경우 공구 팁의 이동이 프로그래밍되고 밀링 머신의 경우 커터 축의 이동이 프로그래밍됩니다.
커터의 축은 등거리 선, 즉 커터의 반경과 동일한 일정한 값만큼 가공될 표면에서 이격된 선 또는 표면을 따라 이동합니다.
부품의 필요한 윤곽;
등거리;
커터.
두 개의 피드가 프로그래밍됩니다. 앵커 포인트는 처리 중인 윤곽에서 선택되며, 이는 윤곽이 특성을 변경하는 포인트(포인트 4, 5, 6, 7)입니다.
CNC 시스템에 내장된 컴퓨터는 장비의 작업 본체의 움직임을 근사화합니다. 특히 점 6과 7 사이에 점선이 있는 원을 근사화합니다. 따라서 오류 가 있습니다.
둘 중 하나를 갖춘 CNC 장비 스테퍼 모터, 또는 DC 모터(사이리스터).
하자 N 엑스그리고 N 와이는 각각 X 및 Y 축을 따른 펄스 수이고, 다음
 ,
, ,
,
어디 엑스그리고 ~에– 펄스 가격(개별), 일반적으로 0.0050.01mm 이내입니다.
스테퍼 모터는 토크가 낮고 공작 기계에 사용되지 않습니다. 기계는 DC 모터를 사용하므로 좌표축을 따라 이동 속도를 계산해야 합니다.
 ,
,  ,
,
어디  - 주어진 근사점에서 직선을 따라 이동한 시간, [s], ^S– 이송 속도, [mm/min],
엘는 주어진 점에서 근사 단면의 길이이고,
- 주어진 근사점에서 직선을 따라 이동한 시간, [s], ^S– 이송 속도, [mm/min],
엘는 주어진 점에서 근사 단면의 길이이고,
 .
.
CNC 시스템의 구조
^
없는 CNC 구별 피드백그리고 피드백과 함께.
피드백이 없는 컨트롤의 구조는 다음과 같습니다.

프로그램 캐리어;
디코더(리더);
중간 장치(메모리);
액추에이터.
피드백이 있는 제어 구조:

1, 2, 3 - 피드백이 없는 장치와 유사합니다(이전 그림 참조).
비교 장치;
증폭기;
구동 장치;
피드백 센서.
제어 시스템의 제어는 여러 채널을 통해 이루어지므로 제어 시스템의 전체 구조는 다음과 같습니다.

BTK - 기술 명령 블록
프로그램 캐리어;
자기 헤드;
전자 유닛;
채널(움직임 제어 기술 장비및 명령 채널);
주요 운동의 드라이브;
냉각수 공급 모터;
기계 유압 펌프 모터;
증폭기;
파워 드라이브(DC 모터);
피드백 센서;
기계의 작업 기관;
리드 나사.
CNC의 종류
위치 CNC와 윤곽 CNC를 구별하십시오.
Positional CNC는 특정 지점으로 작업체의 이동만을 제어합니다. 예를 들어 구멍을 뚫을 때 프린트 배선판구멍의 좌표만 지정하면 됩니다.
윤곽 컨트롤은 한 위치에서 다른 위치로 이동하는 과정에서 필요한 속도를 제공합니다. 이 속도가 이송 속도입니다.
금속 절단기의 지정에서 사용되는 CNC 유형을 표시하는 것이 가능합니다. 지정이 끝나면 다음이 표시됩니다.
…C – 순환 프로그램 제어, 제어 요소는
리미트 스위치, 스톱 등
... F1 - 기계에 공구 위치의 디지털 표시가 있습니다.
... F2 - 위치 CNC.
... F3 - 윤곽 CNC.
... F4, ... F5 - 머시닝 센터(MC) - 다중 작업 기계
위치 및 윤곽 제어가 각각 있습니다.
또한 기계 지정에는 문자 P와 M이 있습니다.
P - 포탑(예: RF3).

M - 장비에는 OT에 일반적인 요소 저장소가 장착되어 있습니다.

^ CNC 도구
CNC 기계용 도구 범위(표 1 - 5 참조)는 다음을 기반으로 합니다. 통계 분석부품의 형상과 크기, 공작기계의 기술력. 특정 처리 조건에서는 다른 도구(도구 재료)도 사용할 수 있습니다.
드릴은 구멍을 만드는 데 사용됩니다. 보링 커터제한된 범위. 대부분의 경우 카운터 싱크와 리머는 사용되지 않습니다. 구멍에 대한 7 및 8 등급은 보링으로 얻습니다(리머의 사용은 대량의 부품을 처리하는 경우에만 권장됨).
직선 돌출부가 형성된 외부 주요 표면은 황삭의 경우 각도 =95° 1 =5°인 관통 절단기 및 정삭을 위한 각도 =93° 및 1 =32°인 윤곽 커터로 형성됩니다(표 참조 1) .
내부 주요 표면을 처리할 때 센터링 및 나선형 드릴이 사용되며 각도가 =95°, 1 =5°인 보링 커터와 각도가 =93°, 1 =32인 황삭 및 보링 윤곽 커터가 사용됩니다. 마무리 . 보링 공구의 치수는 가공되는 구멍의 치수(직경 및 길이)에 따라 설정됩니다.
막힌 구멍을 처리하기 위해 직경이 25, 30, 35, 40, 45 및 50mm인 스페이드 또는 나선형 바닥 드릴이 사용됩니다.
외부 및 내부 추가 표면을 형성하려면 홈이 있는 커터, 앵귤러 홈용 커터, 각도가 = 60, 55인 나사 커터(미터 및 인치 나사용)가 필요합니다.
공구 및 공구 홀더의 설계는 공구를 기계 외부의 크기로 사전 설정하고 지지대 또는 포탑의 작업 위치에 공구를 빠르고 정확하게 설치하고 칩의 형성 및 제거를 제공해야 합니다. CNC 기계의 자동 작동 조건에서.
^
1. 외부 주요 표면을 처리하기 위한 도구.
| 커터 | 작업 부분의 형태 | 평면의 각도, 도 | 절단 재료 |
|
| | 1 |
|||
| 패스 득점 왼쪽 |  | 95 | 5 | T14K8, T5K10, VK8 |
| 스트레이트 득점권 |  | 95 | 5 | |
| 개요 왼쪽 |  | 93 | 32 | T14K8, T15K6, VK6 |
| 등고선 오른쪽 |  | 93 | 32 |
|
| 개요 왼쪽 |  | 63 | 62 |
|
| 등고선 오른쪽 |  | 63 | 62 |
|
메모. 윤곽 커터 오른쪽(왼쪽)은 추가 표면 처리에도 사용됩니다.
^
2. 내부 주요 표면 처리용 도구.
| 커터 | 작업 부분의 형태 | 절단 재료 |
| 지루한 패스 |  | T14K8, T5K10, VK8 |
| 보링 윤곽 |  | T14K8, T15K6, VK6 |
^ 3. 외부 추가 표면 처리용 도구.
| 커터 | ^
작업 부분의 형태 | 치수, mm | 절단 재료 |
||
| 비 | 엘 | 디 |
|||
| 코너 홈용 |  | 2x2 | - | - | R18 |
| 3x3 | T5K10, VK8 |
||||
| 슬롯 |  | 1 | 3 | - | R18 |
| R18, T15K10 |
|||||
| 3 | 10 |
||||
| T15K10, VK8 |
|||||
| 6 | 15 |
||||
| 단면 홈 가공용 |  | 3 | 25 | 30 | R18 |
| 150 |
|||||
| 6 | 35 |
| T5K10, VK8 |
||
| 10 | 40 |
|
|||
| 스레드 |  | - | - | - | T15K6, VK6 |
| 탈부착 가능한 |  | 3 | 35 | - | R18 |
4. 내부 추가 표면 처리용 도구.
| 커터 | 작업 부분의 형태 | 치수, mm | 절단 재료 |
|||||||
| 비 | 엘 | 엘 | 디 |
|||||||
| 코너 홈용 |  | 2 | - | 60 | 10까지 | R18 |
||||
| 3 | 100 | 10-50 |
||||||||
| 5 | 150 | 50 – 100 | T5K10, VK8 |
|||||||
| 8 |
||||||||||
| 200 | 세인트 100 |
|||||||||
| 슬롯 |  |
| 최대 60 | 10시부터 | R18 |
|||||
| 3 | 10 | 100 | 16부터 |
|||||||
| 6 | 15 | 150 | 20부터 | T5K10, VK6 |
||||||
| 10 | 25 | 200 | 50부터 |
|||||||
| 스레드 |  | - | - | - | - | T15K6, VK6 |
||||
^ 5. 구멍 가공용 도구.
| 송곳 | 작업 부분의 형태 | 크기, dmm | 절단 재료 |
| 센터링 |  | 6.3(D= 25mm에서) | R6M5, R18 |
| 나선 |  | 10,1 | R6M5, R18 |
| 라멜라(깃털) |  | 25,0 | R6M5, R18 |
메모. 스핀들이 한 방향으로만 회전하는 기계의 경우 왼손 드릴을 사용해야 합니다.
^ 제어 프로그램(CP)의 구조 및 형식
UE는 기술, 기하학적 및 보조 정보의 코딩 언어에서 의미가 완전한 문구인 프레임 시퀀스의 형태로 프로그램 캐리어에 기록됩니다. 미디어에 대한 정보는 7비트 ISO 코드로 저장되어 문자와 숫자 형태의 명령 기록을 제공합니다. 워크피스 섹션을 처리하기 위한 별도의 프레임 시퀀스가 UE 챕터로 결합되며, 각 챕터는 메인 프레임으로 시작합니다. 메인 프레임에는 처리 조건에 대한 초기 정보가 포함되어 있으며 여기에서 NC에 따라 기계 작동을 시작하거나 재개할 수 있습니다. 단말 헤드의 나머지 프레임은 이전 프레임과 관련하여 변경된 정보의 일부만을 전달하며 이를 부가 프레임(additional frame)이라고 한다.
프레임은 일정한 순서로 배열된 단어들로 구성되고 단어는 문자들로 구성됩니다. 단어의 첫 번째 문자는 주소를 나타내는 문자이고 나머지 문자는 부호 있는 숫자 또는 정수 코드를 형성합니다(표 6).
6. 주소의 지정.
| 기호 구애 | ^
주소 기호 값 |
| A, B 및 C | X, Y 및 Z축을 중심으로 하는 각 움직임. |
| 디 | 특수 축 또는 세 번째 이송 기능 또는 공구 옵셋 기능을 중심으로 한 각도 이동. |
| 이자형 | 특수 축 또는 두 번째 이송 기능을 중심으로 한 각도 이동. |
| 에프 | 피드 기능. |
| G | 준비 기능. |
| 시간 | 결정되지 않은. |
| 나, 제이, 케이 | X, Y 및 Z 축을 따라 각각 보간 매개변수 또는 나사산 피치. |
| 엘 | 결정되지 않은. |
| 중 | 도우미 기능. |
| N | 프레임 번호입니다. |
| P와 Q | 각각 X 및 Y 축에 평행한 이동의 세 번째 기능 또는 도구 오프셋 매개변수. |
| 아르 자형 | 빠른 Z축 이동 또는 세 번째 Z축 이동 기능 또는 도구 오프셋 매개변수. |
| 에스 | ^
주요 이동 속도. |
| 티 | 도구 기능. |
| U, V 및 W | X, Y 및 Z 축에 각각 평행한 변위의 두 번째 기능. |
| X, Y 및 Z | X, Y 및 Z 축을 따라 각각 이동합니다. |
메모. D, F, P, Q, R, U, V, W 기호가 테이블에 제공된 값으로 CNC에서 사용되지 않는 경우 다른 특수 값으로 사용할 수 있습니다.
UE 프레임은 "프레임 번호"라는 단어와 하나 이상의 정보 단어를 포함합니다. 정보에는 "준비 기능", "차원 이동", "이송 기능", "주 이동 속도", "공구 기능" 및 "보조 기능"이라는 단어가 포함됩니다. 프레임에서 이러한 단어는 동일한 순서를 갖습니다.
^
프레임 번호
"Frame number"라는 단어는 UE의 기본 구간을 지정하는 역할을 하는 보조 정보이다. 프레임 번호는 주소 N과 10진수 정수로 지정됩니다. 프레임의 순차적인 번호 매기기는 합리적이지만 번호의 모든 전환이 허용되며 하나의 UE 내에서 반복되지 않는 것만 규정됩니다. 편집 중에 삽입된 새 프레임에 번호를 매길 때 이전에 설정된 번호 순서가 변경되지 않도록 하기 위해 더 높은 자릿수 십진수를 사용하여 새 번호를 기록하는 것이 좋습니다. 예를 들어, 프레임 N107 뒤에 여러 개의 새 프레임을 삽입해야 하는 경우 N10701, N10702, N10703 등으로 번호를 지정할 수 있습니다. 천공된 테이프를 되감으면 중지합니다.
^
준비 기능
"준비 기능"이라는 단어는 CNC의 작동 모드를 정의합니다. 이 단어는 주소 G와 두 자리 십진수로 제공됩니다(표 7.8).
^ 7. 준비 기능의 목적 .
| 준비 기능 | 그룹 | 의미 |
| G00 | 1 | 포지셔닝. 주어진 지점까지 고속으로 이동합니다. 이전에 설정한 절단 이송은 취소되지 않습니다. 축 이동은 조정되지 않을 수 있습니다. |
| G01 | 1 | 선형 보간. 프로그램된 이송 속도로 직선으로 한 점까지 이송합니다. |
| G02 및 G03 | 1 | 원형 보간. 프로그래밍된 이송 속도로 각각 음의 방향과 양의 방향으로 호 이동. |
| G04 | - | 정지시키다. 리모컨에 설정되어 있거나 액자에 설정되어 있는 일정 시간 동안 운동할 때의 노출. |
| G06 | 1 | 포물선 보간. 프로그래밍된 피드를 사용한 포물선 이동. |
| G08 | - | 오버클럭 이동 시작 시 프로그래밍된 값으로 이송 속도를 부드럽게 증가시킵니다. |
| G09 | - | 프레임 끝에서 제동. 설정값에 접근할 때 이송 속도를 고정 값으로 부드럽게 줄이십시오. |
| G17,G18,G19 | 2 | 처리 평면. 원호 보간, 커터 보정 등의 기능에 대해 XY, ZX 및 YZ 평면을 각각 지정합니다. |
| G33,G34,G35 | 1 | 실. 각각 일정하고 증가하는 피치와 감소하는 피치로 스레딩. |
| G40 | 3 | G41-G52 기능 중 하나로 지정된 공구 옵셋을 취소합니다. |
| G41 및 G42 | 3 | 윤곽 제어에서 공구 직경 또는 반경 보정. 절삭 공구는 공구 이동 방향에서 볼 때 가공할 표면의 왼쪽 또는 오른쪽에 각각 위치합니다. |
| G43 및 G44 | 3 | 공구 직경 또는 공구 반경 오프셋은 각각 양수 또는 음수입니다. 프레임에 지정된 좌표로 콘솔에 설치된 도구의 오프셋 값의 추가(또는 빼기)에 대한 각각의 표시. |
| G45-G52 | 3 | 직선 성형용 공구 직경 또는 반경 보정 G45 / , G46 /-, G47-/-, G48-/ , G49 0/ , G50 0/-, G51 /0, G52-/0. 값 " ", "-"및 "0"은 각각 리모콘에 설정된 값이 프레임에 지정된 좌표에 추가되거나 이러한 값이 고려되지 않음을 나타냅니다 . |
| G53 | 4 | 기능 G54-G59 중 하나로 지정된 선형 이동을 취소합니다. |
| G54-G59 | 4 | X, Y, Z, XY, ZX 및 YZ에서 각각 선형 이동. 콘솔에 설정된 값으로 도구의 길이 또는 위치 수정. |
^ 7. 준비 기능 할당(계속) .
| 준비 기능 | 그룹 | 의미 |
| G60 및 G61 | 5 | 정확한 포지셔닝. 공차 영역 중 하나 또는 두 개 내에서 위치 지정 및 위치 지정 시 접근 방향 선택. |
| G62 | 5 | 빠른 포지셔닝. 시간을 절약하기 위해 큰 공차 영역으로 포지셔닝. |
| G63 | - | 탭으로 실 절단. 지정된 위치에 도달하면 스핀들 정지로 위치 결정. |
| G80 | 6 | G81-G89 기능 중 하나로 지정된 고정 사이클을 취소합니다. |
| G81-G89 | 6 | 일정한 주기. 구멍 가공에서 자주 사용되는 명령 시퀀스입니다. 고정 사이클의 구성은 보충 표에 나와 있습니다. |
| G90 | 7 | 절대 크기. CNC 시스템의 영점에서 원점을 사용하여 절대 좌표 시스템의 움직임을 계산합니다. |
| G91 | 7 | 증분 크기. 이전에 프로그래밍된 지점을 기준으로 이동을 계산합니다. |
| G92 | - | 절대 위치 누산기 설정. |
| G94 및 095 | 8 | 측정 단위는 각각 mm/min 및 mm/rev입니다. |
| G96 | 9 | 절단 속도의 측정 단위는 m/min입니다. 절삭 속도의 프로그래밍된 값은 스핀들 속도의 조절에 의해 자동으로 유지됩니다. |
| G97 | 9 | 메인 모션 유닛 RPM |
8. 고정 사이클에 대한 표.
| 일정한 주기 | 처리 전 조치 | 진행중인 움직임 | 처리 후 조치 | | 일반적인 사용 |
| G81 | - | 일하는 뇌졸중 | - | 빠른 철수 | 교련, 센터링 |
| G82 | 일어서다 | 교련, 카운터싱킹 |
|||
| G83 | 펙 피드 | - | 깊은 드릴링 |
||
| G84 | 주어진 방향으로 스핀들 회전 활성화 | 일하는 뇌졸중 | 역전 축 | 직장에서 철수 줄질 | 스레딩 수도꼭지 |
| G85 | - | - | 지루한 |
8. 고정 사이클에 대한 표(계속).
| 일정한 주기 | 처리 전 조치 | 진행중인 움직임 | 처리 후 조치 | 시작 위치로 이동 | 전형적인 용법 |
| G86 | 스핀들 켜기 | 일하는 뇌졸중 | 스핀들 정지 | 빠른 철수 | 지루한 |
| G87 | 수동으로 후퇴 |
||||
| G88 | 기다리다, 스핀들 정지 | ||||
| G89 | - | 일어서다 | 직장에서 철수 줄질 |
지정되지 않은 준비 기능 코드는 CNC 개발자의 재량에 따라 개별적으로 사용하기 위한 것입니다. 두 번째 열에 있는 그룹 번호는 G 코드가 동일한 그룹의 다른 기능으로 대체되거나 취소될 때까지 유효함을 나타냅니다. 이 열의 대시는 기능이 지정된 블록에서만 활성화됨을 의미합니다. 준비 함수는 코드 번호의 오름차순으로 프레임에 순차적으로 기록됩니다. 각 그룹에서 하나 이상의 준비 기능을 블록에 기록할 수 없습니다.
^
그림에서 몇 가지 준비 기능의 동작을 보여 드리겠습니다.




![]()
^
보조 기능
"보조 기능"이라는 단어는 기계 또는 CNC의 집행 기관에 대한 명령을 정의합니다. 보조 기능은 주소 M과 두 자리 10진수 코드 번호가 있는 단어로 지정됩니다(표 9).
^ 9. 보조 기능의 목적 .
^ 9. 보조 기능 할당(계속) .
| M02 | 피 | UP 끝. 스핀들 정지 및 냉각. 제어 장치를 원래 상태로 되돌리고 기계의 작업 본체를 원래 위치로 되돌리고 링에 접착 된 천공 테이프를 당기거나 되감습니다. |
| M03 및 M04 | * | 스핀들 회전은 시계 방향 또는 시계 반대 방향입니다. 회전의 음의 방향과 양의 방향으로 각각 스핀들을 켭니다. |
| M05 | 피 | 스핀들 정지. 제동과 같은 가장 효율적인 방법으로 정지하십시오. |
| M06 | 도구 변경. 도구를 수동 또는 자동으로 변경하는 명령입니다. 도구가 검색되지 않습니다. 스핀들과 냉각을 자동으로 끌 수 있습니다. |
|
| M07 및 M08 | * | 냉각을 켭니다. 냉각 2호와 1호를 각각 포함합니다. |
| M09 | 피 | 냉각을 끕니다. 기능 M07, M08, M50 및 M51에 의해 주어진 명령을 취소합니다. |
| M10 및 MP | * | 클램프 및 해제. 테이블, 척 등과 같은 기계 가동부의 클램핑 장치를 말합니다. |
| M13 및 M14 | * | 스핀들 회전은 시계 방향 및 시계 반대 방향뿐만 아니라 냉각 포함. M03 및 M04와 동일하지만 냉각이 활성화되어 있습니다. |
| M15iM16 | " " 및 "-"를 이동합니다. 이 블록에 프로그래밍된 이동의 양수 및 음수 방향을 각각 설정하는 데 사용됩니다. |
|
| M17 | 피 | 내장 메모리가 있는 CNC의 서브루틴 끝. 서브루틴의 모든 실행이 완료된 후 메인 프로그램으로 제어를 전송합니다. |
| M19 | 피 | 지정된 위치에서 스핀들이 정지합니다. 특정 각도 위치에서 스핀들을 정지시키는 명령입니다. |
M20 | 피 | 반복적으로 읽는 프로그램 챕터로 사용되는 서브루틴의 끝. |
| M30 | 피 | 테이프 끝. M02와 동일하지만 천공 테이프에서 정보의 두 번째 판독기에 액세스할 수 있습니다. |
| M31 | 우회 차단. 잠금을 일시적으로 취소하는 명령입니다. 기록된 프레임에서만 유효합니다. |
|
| M36 및 M37 | * | 배달 범위. 기구학적 연결을 전환하여 각각 1번과 2번의 이송 범위를 설정합니다. |
| M38 및 M39 | * | 스핀들 속도 범위. 스핀들 #1 및 #2의 속도 범위를 각각 설정합니다. |
| M50 및 M51 | * | 냉각을 켭니다. 냉각 포함, 각각 3번 및 4번. |
| M55 및 M56 | * | 도구 선형 오프셋. 1번과 2번 위치로 각각 도구의 선형 변위. |
| M61 및 M62 | * | 공작물의 선형 변위. 위치 1번 및 2번으로 각각 공작물의 선형 변위. |
| M71 및 M72 | * | 공작물의 각도 변위. 위치 1번과 2번에서 각각 공작물의 각도 변위. |
지정되지 않은 코드는 정의되지 않으며 특정 CNC 설계자의 재량에 따라 사용될 수 있습니다.
대부분의 보조 기능(두 번째 열에 별표로 표시됨)은 동일한 블록에 프로그래밍된 이동이 시작되기 전에 실행되며 취소되거나 동일한 목적의 명령으로 대체될 때까지 유효합니다. 블록에 지정된 이동 후에 실행되는 M 기능은 동일한 열에 문자 P로 표시됩니다. 한 프레임에서 코드 번호의 오름차순으로 여러 명령을 다른 집행 기관 CNC 기계.
^
CNC 기계용 프로그램 개발 예

% N001 S03 T01 M03 - 세 번째 스핀들 속도, 첫 번째 도구, 반시계 방향 스핀들 회전
N002 M06 - 공구 점검 일시 중지
N003 G60 - 정확한 위치 지정
N004 G91 - 증분 크기 카운트
N005 G00 X-030045 - 포인트 1로 이동
N006 G61 Z-015000 - 포인트 2로 빠르게 이동
N007 G01 Z-045000 F32 M07 - 작업 피드에서 지점 3으로 이동하고 오일 미스트 켜기
N008 G01 X 004960 Z-035000 - 선형 보간으로 포인트 4로 이동
N009 Z-025000 - 포인트 5로 이동
N010 G60 - 정확한 위치 지정
N011 G00 X 025085 M09 - 포인트 6으로의 빠른 이동, 냉각 시스템 종료
N012 G00 Z 120000 M02 - 포인트 0으로의 빠른 이동, 프로그램 종료
금속 가공 기계의 프로그램 제어의 본질은 특정 유형의 CNC와 관련하여 기하학적, 논리적, 기술적 및 최종 문제를 해결할 수 있는 수치 형식의 제어 프로그램 개발입니다.
기하학적 문제의 솔루션은 도구 또는 공작물의 해당 이동에 의해 부품의 형상을 제공합니다.
논리적 작업은 기계의 자동화가 특정 논리적 순서로 제어되도록 하는 것입니다.
기술 작업은 결과 부품의 지정된 품질을 보장하는 것을 목표로 합니다.
터미널 작업은 터미널 장치 - 터미널을 통해 운영자와 통신을 제공하는 것입니다.
H-22-1M 시스템에 적용하면 이러한 작업은 다음과 같은 방식으로 해결됩니다.
UE - 특정 공작물을 처리하기 위한 기계의 기능을 위한 주어진 알고리즘에 해당하는 프로그래밍 언어의 명령 세트.
회전할 때 도구(날의 상단)의 상호 이동은 특정 궤적(공작물의 윤곽)을 따라 수행됩니다. 공작물 윤곽의 개별 섹션은 기하학적 요소(선분, 원호 등)로 간주될 수 있습니다. 기하학적 요소의 교차점을 기하학적 참조점이라고 합니다. 선택한 좌표계의 각 기준점은 숫자(좌표)로 설명할 수 있습니다. 도구의 연속적인 위치의 수를 정의하는 숫자의 조합은 UE의 주요 부분입니다. 기하학적 참조점의 좌표는 절대적일 수 있습니다. 0점을 기준으로 각 점에 대해 설정하거나 상대(증분 단위로 설정)로 한 기준점에서 다른 기준점으로의 도구 이동 방향으로 설정됩니다. 프로그래밍할 때 개별 기준점 사이의 도구 이동 속도, 여러 보조 기술 명령을 지정해야 합니다. 기술 과정의 흐름에 대한 조건을 설명하는 법칙이 변경되는 계산된 궤적의 점을 기술 기준점이라고 합니다.
각 UE는 "프로그램 시작"이라는 문자로 시작합니다.
지정 "번호" 제어 프로그램"프로그램 시작" 기호 바로 뒤에 위치해야 합니다. 프로그램 캐리어에 여러 UE를 배치할 때 "프로그램 시작" 기호 앞에 "프로그램 시작" 문자를 하나 더 쓸 수 있습니다. 프로그램 블록의 번호는 다음 블록부터 시작됩니다.
각 프레임에는 두 기준점 사이의 공작물 단면을 가공할 때 제공해야 하는 기하학적 및 기술 데이터가 포함되어 있습니다.
UE의 기본 수치 단위는 프레임입니다. 블록은 CNC 시스템에서 전체적으로 인식되며 적어도 하나의 명령을 포함합니다. 프레임에는 특정 유형의 CNC에 대한 특정 형식이 있습니다. 프레임은 단어로 구성됩니다. 각 단어에는 특정 정보(명령)가 포함되어 있습니다. 단어는 주소(라틴어 대문자)와 데이터(수학적 기호 "+" 또는 "-" 및 숫자)로 구성됩니다. 프레임의 첫 번째 단어는 항상 "프레임 번호" - 주소 N, 데이터 - 세 자리 숫자 . 숫자는 프로그램을 체계화하는 역할을 하며 과정에는 영향을 미치지 않습니다. 프레임의 나머지 단어는 임의로 정렬할 수 있지만 다음 단어 시퀀스(해당 주소에서)를 권장합니다.
N, G, X, Z, I, K, F, S, T, M, L.
단어 X, Z, I, K, L을 사용하여 기하학적 문제를 풉니다.
G, F, S, T, M이라는 단어는 논리적 문제에 대한 솔루션을 제공합니다.
시스템의 기술적 문제에 대한 솔루션이 제공되지 않습니다.
터미널 작업은 시스템 자체의 설계에 따라 결정됩니다.
제어 프로그램 개발의 주요 단계.
1. 복잡한 "CNC 기계"
입력 일반보기"CNC 기계"복합체의 구조는 각각 제어 프로그램, CNC 장치 및 공작 기계의 작업을 수행하는 세 개의 블록으로 나타낼 수 있습니다.
복잡한 모든 블록은 단일 구조에서 상호 연결되어 작동합니다. 제어 프로그램에는 제품의 기하학적 및 기술적 형성의 모든 단계에 대한 확대된 조정 설명이 포함되어 있습니다. 정보의 관점에서 볼 때 이 설명에서 가장 중요한 것은 바로 이것이라는 것입니다. 모호한 해석을 허용하지 않는다는 것입니다. CNC 장치에서 정보는 UE에 따라 전송됩니다. 그런 다음 계산 주기에 사용되며 그 결과 실제 기계 시간에 작동 명령이 생성됩니다.
기계는 제어 정보의 주요 소비자이자 실행 부분입니다. 제어 개체. a 건설적인 의미에서 - 메커니즘이 장착되는 지지 구조 자동 제어 CNC에서 작동 명령을 수신하도록 조정되었습니다. 이러한 메커니즘 중에는 주로 제품의 기하학적 모양에 직접 관련된 메커니즘이 있습니다. 방향이 다른 좌표 피드의 메커니즘입니다.
제어 프로세스에서 피드 메커니즘은 가장 많은 양의 계산 정보 처리를 필요로 하므로 CNC 장치의 복잡성은 제어된 좌표의 수, 형상의 기하학적 문제의 복잡성에 크게 의존합니다.
CNC 시스템으로 해결되는 주요 작업:
· 시스템 소프트웨어의 입력 및 저장. 하위 클래스의 장치에서는 디자인에 내재되어 있으며 변경할 수 없습니다. 입력 현대 시스템 ah는 외부에서 입력하고 구성할 수 있으며 다른 등급의 기계를 위한 것입니다.
· 비휘발성 장치에 제어 프로그램의 입력 및 저장.
프레임 해석. 2개의 프레임을 읽습니다. 첫 번째 프레임이 처리되고 두 번째 프레임이 연속 작동을 위해 사전 분석됩니다. 최신 시스템은 최대 1000개의 프레임을 읽고 분석합니다.
· 보간. CNC는 지정된 정확도로 중간 지점을 계산합니다. 최신 NURBS 시스템은 CAD / CAM 시스템에서 공작물의 전자 모델을 수신하고 곡면은 스플라인 및 다항식의 형태로 전송되고 장치 자체에서 처리되고 피드 드라이브에 대한 신호로 변환됩니다.
· 피드 드라이브 제어. 궤적을 따른 모션 제어 외에도 작업 본체의 실제 위치를 제어 시스템과 조정하기 위한 추가 모드, 기계 영점 조정, 제동 제어.
메인 무브먼트의 구동 제어(온, 오프, 각도 제어, 속도 안정화)
논리적 제어
도구 크기 보정
공구 교환
· 최신 시스템의 경우 측정 및 기계 장치의 오류 수정, 처리의 적응 제어, 통계 정보 축적, 자동 내장 제어, 고급 PC와의 통신, 기술 진단이 가능합니다.
제어 프로그램 준비 단계.
CNC 장비에 대한 기술 프로세스의 개발은 모든 기술 문제를 해결하는 데 더 많은 세부 사항이 필요합니다. 작업을 기준점에 따라 단계로 나눌 필요가 있습니다. 단계는 모드가 변경되지 않는 동안 기하학적 요소를 따라 도구를 이동하는 것입니다. 기술 명령은 움직임을 수행하기 위한 조건을 정의합니다. 기본 동작과 기술 명령의 순서는 제어 프로그램의 내용을 결정합니다.
기술 프로세스의 개발은 세 단계로 구성됩니다.
경로 TP;
운영 TP;
· UE의 개발.
기계 공학 기술의 CNC 기계에서 처리하기 위한 부품 선택. 주요 요인은 다음과 같은 경제적 이점입니다.
조각 계산 시간 단축
기계 시간
보조 시간
제품 품질 향상 등
UE 개발 순서:
UE 개발 순서(수동 프로그래밍):
개별 처리 단계의 순차적 프로그래밍.
1. 작업을 전환으로 분리합니다.
2. 부품의 기초 결정.
3. 전환 순서 결정(표면이 11 등급 이상의 정확도로 가공되는 경우 별도의 도구로 마무리 패스를 수행하는 것이 좋습니다.) 결과는 운영 카드입니다
4. 도구의 목적. 절삭 공구 유형 외에도 블록 번호를 지정하고 데이텀 점을 기준으로 절삭 날의 방향과 위치를 결정해야 합니다. 이렇게 하면 도구 설정 차트를 얻을 수 있습니다.
5. 이동으로의 전환 분리.
6. 절삭 조건 계산
7. 기준점 표시와 함께 각 도구의 이동 궤적 구성
8. 제어점의 좌표 계산.
9. 기술 명령의 정의
10. 프로그램 코딩
11. 프로그램 디버깅 및 테스트 부품 처리, 편집.
CNC 프로그래밍의 기초. (SINUMERIK 840D, 810D, FMNC 제어용 ISO 6983 표준).
이러한 제어 시스템의 생성은 이전 명령과 함께 새로운 프로그래밍 방법을 사용합니다. 여기에는 DIN66025 명령과 소위 고급 언어 명령이 포함됩니다.
개발 및 구현 프로세스 기술 프로세스제어 프로그램은 건설에서 작업 단계를 다룹니다. 수학적 모델제공된 문서에 따라 그리고 CNC 장비에서 부품을 제조하기 위한 입증된 기술 프로세스를 받을 때까지 부품 및 블랭크. Clio-Soft LLC의 전문가가 사용하는 접근 방식은 최신 CNC 장비에서 부품의 TP 및 NC 처리 개발 및 구현에 대한 다년간의 경험의 결과입니다.
부품 및 공작물의 수학적 모델 구성

부품 및 블랭크의 수학적 모델 구성은 제공된 기술 문서에 따라 NX "모델링" 환경에서 수행됩니다. 수학적 모델 구성 작업을 완료한 후 기술 프로세스의 개념이 개발됩니다. 가공 CNC 기계의 부품.
툴링 디자인
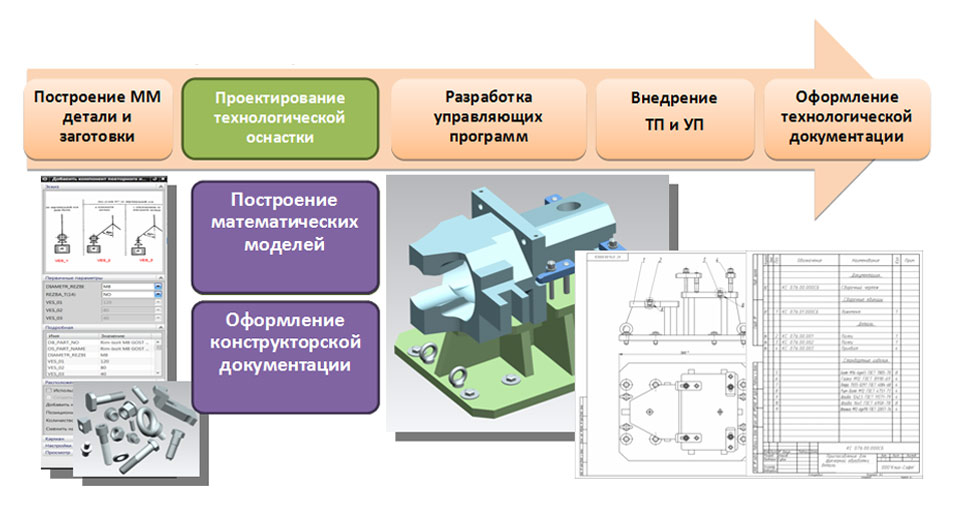
특별한 디자인 기술 장비 CNC 장비의 작업 영역에서 블랭크를 고정하기 위한 작업은 "모델링" 및 "조립" NX 환경에서 부품을 가공하는 기술 프로세스의 개발된 개념에 따라 수행됩니다. 툴링의 수학적 모델을 구축할 때 Clio-Soft LLC에서 개발한 표준 패스너 및 공작 기계 요소의 데이터베이스가 사용됩니다.
기술 장비에 대한 수학적 모델을 구성한 후 ESKD 표준에 따라 설계 문서를 작성할 수 있는 Clio-Soft LLC에서 개발한 설정을 사용하여 NX "Drafting" 환경에서 설계 문서를 작성합니다. 등록 후 설계 문서는 기술 장비 제조를 위해 생산으로 이전되고 기술자는 다음 단계인 제어 프로그램 개발 작업을 진행합니다.
제어 프로그램 개발

제어 프로그램 개발은 NX Machining 환경에서 절삭 공구 선택 및 공구 경로 생성으로 시작됩니다. 제한된 도구 목록을 사용할 수 있는 경우 적절한 NX 데이터베이스를 사용할 수 있습니다. 개발된 궤적은 후처리기를 통해 출력되고 NC 파일이 생성되며 이는 NX Processing 환경에서 직접 오프머신 제어 시스템(ISV)에서 테스트됩니다. 내장된 기계 외 제어 시스템 UE의 사용은 CAM 부분의 모든 변경 사항이 가공 시뮬레이션 프로세스에서 자동으로 고려되기 때문에 수행된 검사의 품질을 보장합니다.
CNC 장비에 TP 및 PM 구현

CNC 장비 및 제어 프로그램에서 부품을 가공하기 위한 기술 프로세스를 구현하는 단계에서 절단 조건이 최적화되고 기술 프로세스의 개념이 개발됩니다. 구현 단계의 결과는 기술 문서 처리 단계에서 문서화되는 CNC 장비에서 부품을 가공하는 간소화된 기술 프로세스입니다.
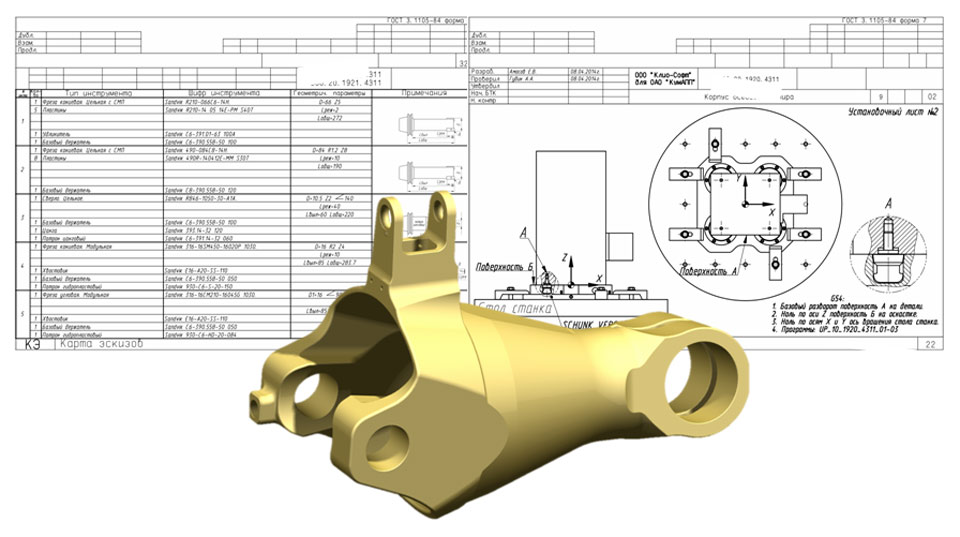
기술문서 등록

CNC 장비의 가공 부품 작업에 대한 기술 문서 등록은 Clio-Soft LLC에서 개발한 OSST 소프트웨어를 사용하여 NX 환경의 처리 파일에서 직접 수행되므로 요구 사항에 따라 기술 문서를 작성할 수 있습니다. ESTD. 이 경우 절삭 도구 및 툴링의 매개 변수, 절삭 모드에 대한 모든 정보는 궤적 생성 작업에서 상속되며 필요한 모든 스케치는 처리 파일의 "도면" 모듈에 직접 작성됩니다. 얻은 데이터는 필요한 텍스트 정보로 보완됩니다. 따라서 출력에서 NX 처리 파일과 관련된 일련의 기술 문서를 얻습니다. 즉, 처리 프로젝트를 변경할 때 기술 문서 출력 후 모든 변경 사항이 고려되어 새 문서 세트에 표시됩니다.
CNC 장비용 TP 및 NC 개발용 소프트웨어 패키지

고려를 사용할 때 소프트웨어 패키지최신 CNC 장비에서 부품을 처리하기 위한 기술 프로세스 및 제어 프로그램의 개발 및 구현을 위한 방법론을 통해 기술자는 단일 정보 환경에서 작업을 수행할 수 있는 기회를 얻음으로써 신제품을 마스터하는 시간을 줄이고 작업 품질을 향상시킵니다. 정보를 복제할 필요 다양한 시스템. 또한 한 사람이 전 범위의 작업을 수행할 때 공동 수행자 간에 정보를 전달할 필요가 없어져 기술자의 책임 수준이 높아져 작업 품질이 향상됩니다.










생수와 사수: 신화인가 현실인가, 생수와 사수의 힘은?
두개유합증, 또는 어린이의 두개골 뼈의 조기 융합
아름다운 머리카락 집에서 머리카락 밀도를 얻는 방법: 유용한 팁
모기가 어떤 사람은 물고 다른 사람은 물지 않는 이유
아름다운 머리카락을 얻는 방법