손가락과 고리가 있는 기존의 가죽끈 장치와 달리(GOST 2571-53 및 GOST 2572-53) 자체 그립 척척에는 2개 또는 3개의 널링된 편심 캠이 있어 절단 시작 시 공작물을 포착하여 회전시킵니다. 절삭 토크가 증가하면 척 토크도 자동으로 증가합니다. 따라서 모든 칩 단면에서 안정적으로 작동합니다. 부품은 평소와 같이 고정 또는 부동 센터에 설치됩니다. 센터에 부품을 쉽게 설치할 수 있도록 자동으로 열리는 캠이 있는 구조를 사용하고 모든 캠이 균일하게 클램핑할 수 있도록 플로팅 캠 시스템 또는 독립적인 동작의 캠이 있는 시스템을 사용합니다.
캠 척이 널리 사용됩니다.높은 토크 전달이 요구되는 다중 절삭 선반에서.
기존 편심 척을 사용할 때 가공 시작시 절삭력의 작용으로 공작물이 회전하여 커터가 파손되는 경우가 있습니다. 이러한 단점을 제거하고 동작의 자동성과 신뢰성을 높이기 위해 최근 원심 관성력을 사용하여 하중을 받는 리드 척이 도입되었습니다. 이 카트리지의 도입은 현대 선반의 스핀들 속도에 의해 촉진되었습니다.
도에서. 22는 모스크바 공작 기계 공장에서 설계한 편심 캠이 있는 척을 보여줍니다. 오르조니키제. 척의 플랜지 1은 그림과 같이 어댑터 플랜지에 볼트로 고정되거나 스핀들 플랜지에 직접 고정됩니다. 척의 본체 3은 스페이서 6 및 리드 핀 2가 있는 나사 5를 통해 플랜지 1에 연결됩니다. 본체 3은 플랜지 1에 대해 홈 방향으로 이동할 수 있으므로 공작물의 균일한 클램핑을 보장합니다. 캠 4; 스프링 9는 본체를 원래의 중앙 위치로 되돌립니다.
편심 캠(4)은 핑거(2)에 자유롭게 장착되고 프로파일에 노치가 있습니다. 스핀들 회전이 시작되면 캠은 추(10)에 의해 발생된 원심력의 작용으로 공작물을 고정하고 회전시킵니다. 절단 과정에서 추가 클램핑이 수행됩니다. 기계가 멈추면 스프링 5의 작용으로 캠이 푸셔 7에 의해 자동으로 열립니다. 핑거 2를 내리기 위해 반원형 표면으로 몸체 3의 반경 홈으로 눌려집니다. 죠를 변경하면 척을 사용하여 직경이 30~150mm인 부품을 고정할 수 있습니다.
원심력의 크기는 기계 스핀들의 회전 속도 n rpm의 제곱에 정비례하며 공식에 의해 결정됩니다.
![]()
어디서? Rn - 원심력(kgf);
u - 회전 추의 무게(kg);
R - 하중 중심에서 기계 스핀들의 축까지의 거리(m);
g는 자유 낙하 가속도(m/sec2)입니다. g = 9.81m/s2.
직경에 따라 원심 구동 척은 총 중량이 -3~6kg인 하중을 지탱할 수 있습니다. 예를 들어, G = 3kg, R = 45lsh, n = 500, 1000, 2000rpm에서 공작물에 캠을 누르는 원심력은 각각 Pc = 34, 138, 552kgf가 됩니다.
두 턱 척정규화되고(MN 4051-62) 정규화된 플로팅(익사) 스프링 장착 센터(MN 4052-62)가 있습니다.
도에서. 23은 정규화된 2의 구성을 보여줍니다. 척그리고 그 부동 센터.
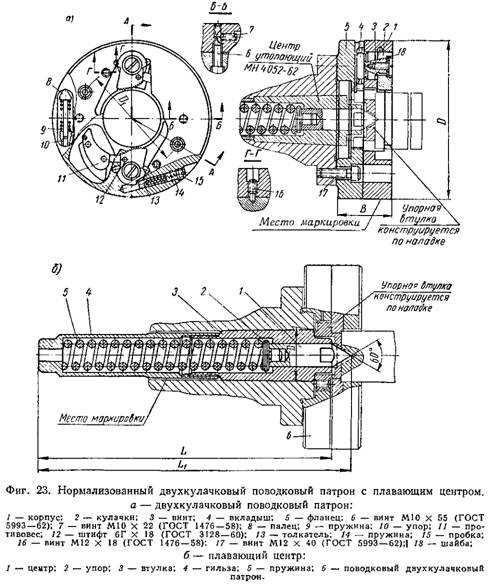
카트리지 및 센터의 주요 치수는 표에 나와 있습니다. 삼.
직경이 17 ~ 72mm 인 클램핑 부품의 경우 7 세트의 교체 가능한 편심 조가 법선과 함께 제공되고 직경이 28 ~ 112mm - 8 세트의 교체 가능한 캠이 제공됩니다. 편심 캠과 플로팅 센터(파트 1)의 매개변수가 정규화됩니다. 캠의 재질은 강철 등급 SHKH15 GOST 801-60입니다. 경도 - HRC 60-64. 센터 소재 - GOST 1435-54에 따른 U8A 스틸; 콘 경도 60° HRC 55-60, 나머지 - HRC 45-50.
|
표 3 2-죠 척 및 오목한 센터(치수(mm))
|
||||||||||||||||||||||||||||||||||||||||
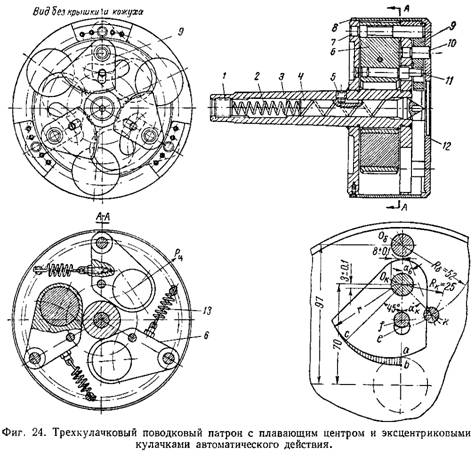
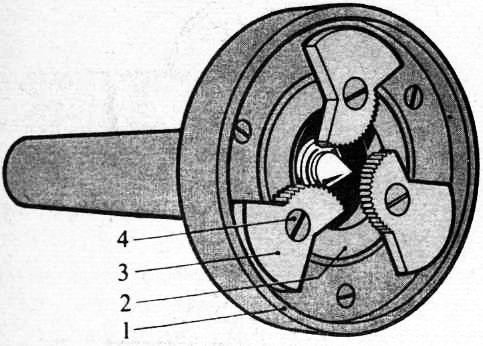
공장에서 "Frazer". M. I. Kalinina는 3-조 원심 척을 설계하고 생산에 투입했습니다.
카트리지 (그림 24)는 용접 된 몸체 "3이며 스프링 2와 3 개의 웨이트 또는 밸런서 6U가있는 플로팅 센터 4가 있습니다.
7축에 장착; 밸런서는 핑거(11)에 의해 클램핑 조(9)에 연결된다. 캠은 카트리지의 전면 벽으로 눌려진 액슬(10)에 장착된다.
중심 4의 축 방향 이동은 나사 5에 의해 제한됩니다. 중심에는 원추형 목이 있고 작업 위치에서 카트리지 본체의 원추형 소켓과 짝을 이루어 박동이 제거됩니다. 스프링 2의 힘은 나사 1로 조정됩니다.
밸런서 6의 무게를 늘리기 위해 납으로 채워진 직경 50mm의 구멍이 제공됩니다. 각 밸런서의 무게는 약 2kg입니다. 밸런서는 스프링 13의 작용을 받아 작동하지 않는 위치에 고정됩니다. 카트리지는 케이싱(8)과 나사로 본체에 고정된 커버(12)에 의해 닫힙니다.
캠 9에서 작업할 때 절삭력 외에도 핑거 11을 통해 전달되는 밸런서의 원심력도 작용하므로 캠이 공작물에 단단히 밀착되어 회전을 허용하지 않습니다. 척에 비해.
척 설계에서 각 하중의 무게 중심에서 스핀들 축까지의 거리는 R = 0.05mm입니다. 그런 다음 G = 2kg에서; n \u003d 1000 rpm, 이전 공식에 따라 각 캠에 작용하는 원심력은 다음과 같습니다.
총 힘 Rts. 합계 = 102-3 = 306kgf.
이러한 힘의 존재는 절단 시작 시 공작물을 회전시킬 가능성을 제거합니다.
부품을 처리하고 스핀들을 멈춘 후 밸런서(6)는 스프링(13)의 작용으로 원래 위치로 돌아가고 캠(9)을 동반하면 자동으로 열리며 공작물이 해제됩니다.
척은 편심 공작물의 경우 원심력이 ca 곡선의 다른 지점에서 고정하기 때문에 플로팅 캠 시스템을 사용하지 않고도 공작물의 균일한 클램핑을 제공합니다.
쓰리-죠 척유사한 디자인의 편심 캠이 정규화됩니다(MN 4050-62). 고정 부품의 직경은 12~85mm입니다.
에게범주:
터닝 비즈니스
운전 장치
구동 장치는 스핀들에서 센터에 설치된 공작물로 회전을 전달하는 데 사용됩니다. 가장 간단한 것은 회전 칼라입니다. 클램프의 구부러진 섕크는 기계 스핀들에 고정된 전면판의 반경 방향 홈으로 들어갑니다. 스핀들과 함께 회전하는 면판은 클램프를 따라 이동하고 공작물은 중앙에 설치됩니다. 직선형 생크가있는 클램프도 사용되며 손가락이나 막대가 가죽 끈 역할을하는 페이스 플레이트가 사용됩니다. 칼라로 작업하는 것은 특정한 위험을 수반합니다. 작업자의 옷이 칼라의 자루에 걸리는 경우가 있을 수 있습니다. 따라서 안전상의 이유로 보호 커버가 있는 면판(안전 면판)이 사용됩니다. 클램핑 된 공작물의 표면을 손상시키지 않기 위해 분할 슬리브가 위에 놓이거나 고무가 클램핑 볼트 아래에 놓입니다.
클램프 설치 및 제거 시간을 줄이기 위해 신속 작동 및 자체 클램핑 클램프가 사용됩니다. 자체 클램핑 가죽 끈 칼라의 주요 부분은 중앙에 설치된 공작물에 장착되는 링입니다. 플랜 스핀들이 켜지면 aiba가 가죽 끈에 작용하여 축에서 회전하여 주름진 작업 표면으로 공작물을 포착합니다. 절단할 때 이 칼라는 공작물을 더 단단히 고정할수록 칩 단면적이 커집니다.

1. 카바이드 센터: a - 경질 합금 증착층, b - 납땜 팁 포함
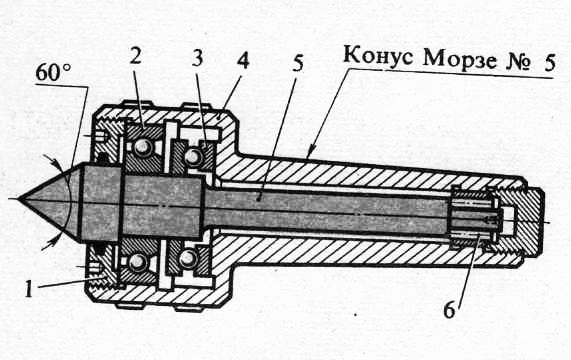
2. 가벼운 방사형 하중을 위한 회전 중심(최대 200KG): 1 - 덮개. 2 - 레이디얼 베어링. 3 - 비틀림 베어링. 4 - 생크가있는 몸체. S - 센터. 6 - 니들 베어링

3. 클램프 적용(a), 범례 구성(b): 1 - 전면판, 2 - 전면 중앙. 3 - 클램프. 4 - 후면 중앙, 5 - 깃

4. 안전한 얼굴: a - 가죽끈 핀 포함, b - 가죽끈 판 포함) " 3- 가죽끈(손가락 또는
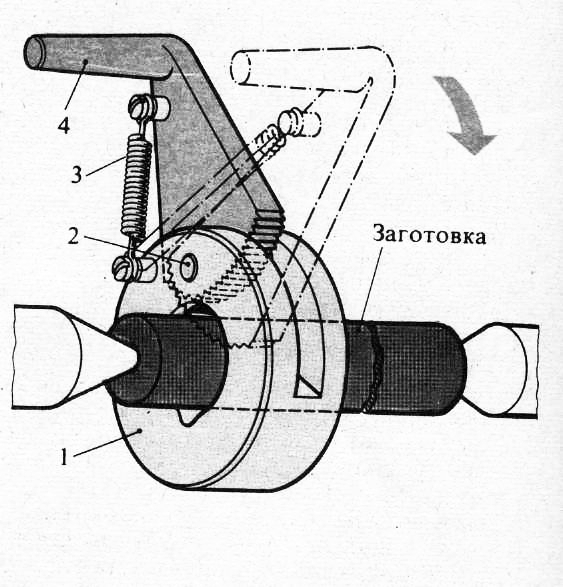
5. 자체 클램핑 리드 척 1링, 2축. 3 - 봄. 4 - 가죽끈
6. 자체 클램핑 리드 척: 1 - 전면판, 2 - "플로팅 링", 3 - 캠, 4 - 캠 축

7. LEADING MANDALE: 1 - 테이퍼 섕크가 있는 맨드릴 본체. 2 - 끝 톱니가 있는 드라이브 와셔. 3 - 플로팅 센터. 4 - 봄. 5 - 스프링 조정 나사
스핀들에서 공작물로의 토크 전달은 종종 편심 캠이 있는 특수 자체 조임 척(면판)에 의해 수행됩니다. 혁신가 V.K. Seminsky의 이러한 카트리지 디자인은 그림 1에 나와 있습니다. 36. 캠 축이 위치한 "플로팅 링"이 있으면 외부 표면이 고르지 않은 공작물(예: 단조품)을 고정할 수 있습니다.
무화과에. 도 7은 구동 와셔의 작업 단부에 위치한 톱니와 함께 공작물을 동반하는 구동 맨드릴을 도시한다. 공작물은 심압대의 중심에 의해 톱니에 눌러집니다.
주름진 드라이브 센터 - "러프"는 직경이 작은 롤러의 리더 역할을 할 수 있습니다. 관형 블랭크를 처리하기 위해 작업 표면에 이빨이있는 "러프"도 사용됩니다. 작은 직경(최대 20mm)의 롤러는 역 중앙에 고정할 수 있습니다. 공작물에서 엔드 콘과 모따기가 미리 가공되고 전면 및 후면 센터에는 랜딩 콘이 있는 해당 구멍이 있습니다. 공작물은 전방 후방 중심과 공작물 사이의 마찰로 인해 회전에 동반됩니다. 리버스 센터의 고정 방법은 마무리에만 사용됩니다. 중앙에 공작물 설치(칼라 착용)는 0.25-0.6분 동안 지속됩니다(부품의 질량에 따라 다름). 자체 조임 척(페이스플레이트) 또는 맨드릴이 있는 센터에 설치하고 마찰 클램프에 설치하면 부품을 클램핑하고 제거하는 시간이 거의 절반으로 단축됩니다. 숙련 된 터너는 작은 직경의 롤러를 처리하여 "유리"유형의 역 중심에 고정합니다 (모따기 기준).
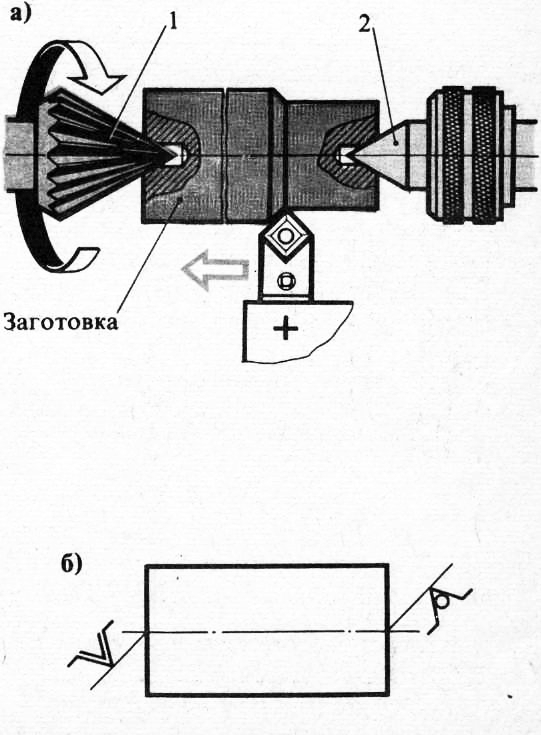
8. 선두 센터의 도움으로 공백 고정 - "Ruff"(a), 서명 체계 (b): 1.2 - 센터
압연 블랭크는 세 턱 척심압대 퀼에 장착된 지지 센터 포함.
센터에서 처리. 선반의 많은 부품이 센터에서 처리됩니다. 광범위한 부품에 대한 설치 방법의 단순성과 균일성, 가공의 예비 및 최종 단계 모두에서 공작물 설치의 높은 정확도는 광범위한 적용에 기여합니다. 공작물에 토크를 전달하기 위해 구동 척의 손가락으로 구동되는 클램프가 사용됩니다. 공작물 오른쪽 끝의 모든 단계를 처리 한 후 다른 끝에서 재설정되어 처리됩니다.
이 계획에는 세 가지 주요 단점이 있습니다.
1) 작업물의 왼쪽 끝에 끈을 고정해야 할 필요가 있습니다. 높은 비용 손 작업숙련공;
2) 샤프트의 완전한 가공을 위해 공작물을 다시 설치해야 하며 여기에는 수작업도 필요합니다.
3) 센터링 깊이의 오차로 인해 강성 중심을 기준으로 길이를 따라 공작물의 위치에 큰 오차가 발생하여 자동화 생산을 위한 기계 설정이 어렵습니다. 선형 치수샤프트.
드라이버 척

첫 번째 단점은 칼라를 사용할 필요가 없는 구동 카트리지 설계를 사용하여 제거됩니다. 이 척에서 공작물은 중심에 놓이고 캠 클램프는 토크를 전달하는 데만 사용되므로 부동 상태가 됩니다. 즉, 캠 중 하나가 공작물의 표면에 놓여 움직임이 멈추고 다른 캠 모든 캠이 동일한 힘으로 공작물을 고정할 때까지 계속 이동합니다.
맨드릴을 고정하기 위해 심압대 퀼에서 전방 중앙으로 전달되는 힘이 사용되며, 이는 왼쪽으로 이동하고 축에 부착된 3개의 레버 캠으로 링을 당깁니다. 원추형 링에 놓인 턱의 뒤쪽 끝은 떨어져 있고 앞쪽 끝은 맨드릴 또는 공작물의 원통형 부분을 고정합니다.
지지 원추형 링은 충분한 반경 방향 간격으로 설치되며 중간 위치에서 스프링으로 지지됩니다. 따라서 캠 중 하나가 공작물의 표면에 닿아 있으면 링이 더 이동하면 캠의 뒤쪽 끝이 지지 링을 누르고 반경 방향으로 변위하여 캠의 움직임을 가속합니다. 반대편.
자체 조임 드라이버 척에서 절삭력은 공작물을 고정하는 데 사용됩니다. 반경 방향의 공작물은 스프링이 장착된 중심을 기준으로 합니다. 공작물이 후방 중앙으로 눌려지면 왼쪽으로 이동하여 끝이 콜릿에 닿을 때까지 스프링을 압축하여 전방 중앙을 고정합니다.
토크를 전달하기 위해 구부러진 주름진 작업 표면이 있는 캠이 사용됩니다. 스핀들이 켜지면 링이 회전하기 시작합니다. 캠 축이 있는 링이 여전히 제자리에 있기 때문에 작업 표면이 공작물의 표면과 접촉할 때까지 캠이 축에서 회전합니다. 링은 공작물 표면이 두드릴 때 모든 캠의 클램핑력을 동일하게 하기 위해 부동 상태로 만들어집니다.
가공이 시작될 때 공작물을 멈추는 경향이 있는 절삭력의 작용으로 캠은 화살표 방향으로 축을 중심으로 추가로 회전하고 주름진 표면은 공작물에 대해 훨씬 더 강하게 눌러져 쐐기 모양으로 고정됩니다. 가공 후 샤프트의 이탈은 스핀들이 제동될 때 회전 방향으로 관성으로 회전하여 발생합니다.
이 구동 척 설계에서는 공작물 설치 및 제거 시간을 단축하는 것 외에도 척에서 처리되는 모든 공작물의 왼쪽 기단이 관계없이 동일한 위치를 차지하기 때문에 축 방향 기초의 정확도가 증가합니다. 중앙 구멍의 깊이.
핀 및 톱니 드라이버 척
샤프트 가공은 끝단을 통해 토크를 전달하고 가공을 위해 자유롭게 남겨두는 핀 또는 톱니 드라이버 척을 사용하여 유망합니다. 외부 표면샤프트. 이 경우 주축대에 가장 가까운 것을 포함하여 모든 샤프트 단계를 하나의 설정으로 가공할 수 있습니다. 공작물은 전방 플로팅 센터 및 후방 회전에 설치됩니다. 유압 실린더가 있는 심압대 퀼로 카트리지 핀에 눌립니다. 유압 실린더는 가공하는 동안 척 핀에 공작물의 필요한 클램핑력을 생성하고 유지합니다.
자체 정렬 기능으로 인해 공작물 끝의 직각도에서 중심 축까지의 편차가 있음에도 불구하고 핀은 동일한 힘으로 공작물의 끝 부분에 대해 눌려지고 토크 전달에 참여합니다. 스프링이 장착된 전면 센터가 있는 이러한 척은 축 방향으로 공작물을 잘 베이스합니다. 핀 및 톱니 척의 이러한 장점으로 인해 범용 장비뿐만 아니라 특히 CNC 및 GPS 기계를 포함한 자동화 기계에서 샤프트를 효과적으로 가공할 수 있습니다.
드라이버 척및 클램프
| 매개변수 이름 | 의미 |
| 기사 주제: | 드라이버 척 및 칼라 |
| 루브릭(주제 카테고리) | 금속 및 용접 |
센터
선삭용 공구 및 고정구
금속 선삭 가공 조건
공작물을 선삭할 때 절단 모드의 요소는 절단 속도, 이송 및 절단 깊이입니다. 절삭 속도는 일반적으로 단위 시간당 공작물의 가공 표면에 대해 공구의 절삭날이 이동한 경로의 길이라고 합니다. 절단 속도는 m/min으로 측정되며 문자로 표시됩니다. υ.
공작물의 1회전(이송 방향) 또는 단위 시간당 공구 절삭날의 이동량을 이송이라고 하는 것이 일반적입니다. 이송은 mm/rev 또는 mm/min 단위로 측정되며 문자 s로 표시되며 세로 방향(공구가 공작물의 회전 축과 평행하게 움직이는 경우) 및 가로 방향(공구가 이 축에 수직으로 움직이는 경우)이어야 합니다. 절단 깊이는 일반적으로 부품의 가공된 표면에 수직을 따라 측정된 절단기의 한 패스에서 절단된 금속층의 값이라고 합니다. 절단 깊이는 밀리미터로 측정되며 문자로 표시됩니다. 티.
공작물의 표면은 다음과 같습니다.
가공(칩이 제거됨), 가공(칩 제거 후 얻음) 및 절삭(가공된 표면과 가공된 표면 사이에서 전환되고 절삭 공구에 의해 형성됨).
강의 3(2시간)
2. 드라이버 척 및 칼라
3. 콜릿 척. 다이어프램 카트리지
4. 공작물 고정
센터. 공작물의 모양과 크기에 대한 의존성을 감안할 때 다양한 유형의 센터가 사용됩니다. 중앙의 작업 부분 상단의 각도는 일반적으로 60 °입니다. 중앙의 작업 부분과 꼬리 부분의 원추형 표면에는 흠집이 없어야합니다. 이는 공작물 처리시 오류로 이어집니다. 보어 직경은 테일 콘의 작은 직경보다 작아서 센터가 손상 없이 소켓에서 녹아웃될 수 있습니다. 원추형 표면꼬리 부분.
센터는 최대 4mm 직경의 공작물을 설치하는 역할을 합니다. 이 블랭크의 경우 중앙 구멍 대신 중앙의 내부 원뿔에 들어가는 60 ° 상단의 각도로 외부 원뿔이 만들어집니다. 이와 관련하여 이러한 중심을 일반적으로 역중심이라고 합니다. 공작물의 끝을 절단하는 것이 매우 중요한 경우 후방 퀼에만 설치된 후방 절단 센터가 사용됩니다. 할머니.
구형 중심 작업 부분축이 기계 스핀들의 회전 축과 일치하지 않는 공작물을 처리해야 하는 경우에 사용됩니다.
작업 부분의 주름진 표면이 있는 중심은 드라이버 척 없이 큰 중심 구멍이 있는 공작물을 처리할 때 사용됩니다.
가공하는 동안 전면 중앙은 부품과 함께 회전하고 지지대 역할만 하는 반면 후면 중앙은 회전하지 않으므로(가열 증가로 인한 경도 손실로 인해) 집중적으로 마모됩니다. 작동 부품의 마모를 방지하기 위해 리어 센터단단한 합금으로 만들어졌습니다. 높은 절삭 속도와 하중으로 가공할 때 후방 회전 센터가 사용됩니다. 중앙의 꼬리 부분에서 차축은 구름 베어링에 장착되며 끝 부분에는 작업 부분가공되는 공작물과 함께 회전을 보장합니다.
센터에서 가공할 때 공작물의 움직임은 구동 핀과 칼라를 통해 구동 척에 의해 전달될 수 있습니다. , 나사로 부품에 부착됩니다.
직경 15-90mm의 샤프트 중심에서 황삭 중 보조 시간을 줄이기 위해 자체 조임 구동 척이 사용된다는 점에 유의하는 것이 중요합니다. 공작물은 기계 중앙에 설치되고 심압대 퀼로 눌러집니다. 동시에 움직이는 척의 중심은 끝이있는 공작물이 콜릿을 누를 때까지 스프링을 압축합니다. ,
센터를 단단히 고정합니다.
ref.rf에서 호스팅
스핀들을 시작할 때 척 본체와 함께 링이 회전하고 ĸᴏᴛᴏᴩᴏᴇ가 나사로 본체에 부착됩니다. 손가락이 있는 링은 캠의 톱니 표면이 공작물의 표면에 닿을 때까지 축에 대해 캠을 시계 반대 방향으로 회전합니다. 캠이 있는 공작물의 클램핑력은 절삭력에 따라 달라집니다. 죠에 균일한 하중을 가하기 위해 링 ,
축의 핀이 고정되어 있는 경우 반경 방향으로 이동할 수 있고 공작물 표면에서 캠의 자체 정렬을 제공할 수 있습니다. 스핀들이 멈춘 후 관성에 의해 회전하는 부품은 축에 대해 캠 디스크를 시계 방향으로 돌리고 마운트에서 해제됩니다.
기계의 중앙에 설치된 스핀들에서 가공할 공작물로의 회전 전달은 공작물에 장착되고 나사로 고정되는 클램프를 사용하여 수행되며 칼라 섕크는 핀에 기대어 있습니다. 드라이빙 척.
섕크가 몸체에 고정되어 축에서 움직일 수 있는 자체 조임 클램프가 사용하기 더 편리합니다. . 공작물을 마주하는 섕크의 하단 부분은 축에 대해 편심하게 만들어지며 노치가 있습니다. 공작물에 클램프를 설치하기 위해 섕크가 스프링 쪽으로 기울어져 있습니다. , 클램프를 설치한 후 섕크로 작업물을 미리 조입니다. 가공 과정에서 척 핀은 절삭력에 비례하여 섕크로 공작물을 최종 조입니다.
구동 카트리지 및 클램프 - 개념 및 유형. "드라이브 척 및 클램프" 2014, 2015 카테고리의 분류 및 기능.










혼합 성격 장애: 원인, 증상, 유형 및 치료
GTA 4 컨트롤 설정
GTA 온라인 밀수에 대한 FAQ
LPDFR - 경찰에 오신 것을 환영합니다
Grand Theft Auto San Andreas의 거대한 지도와 그 비밀