기계에서 작업 흐름을 구현하기 위해 부품, 도구, 개별 기계 구성 요소를 클램핑하기 위한 장치가 제공되어 처리 중 도구 및 공작물의 위치가 일정해야 합니다.
클램핑 메커니즘 요구 사항. 메커니즘아지마매우 다양하지만 유형에 관계없이 다음과 같은 요구 사항이 적용됩니다. 충분한 강성, 진동 가능성 제거; 정확성; 보편성; 디자인 단순함과 작은 전체 치수. 또한 공작물의 치수 변동, 클램핑 프로세스의 기계화 및 자동화 등에 관계없이 대칭 부품 클램핑의 동심도에 대한 요구 사항이 적용됩니다.
클램핑 메커니즘의 분류(표 3.9). 장치를 고려할 때 로마 숫자는 테이블의 행을 나타내고 아라비아 숫자는 해당 열을 나타냅니다.
폐쇄의 원리에 따라 기하학적(단단한) 폐쇄와 강제 폐쇄가 있는 메커니즘이 구별됩니다.
포지티브 잠금(구성표 1)에서는 변속기 및 클램핑 링크의 변형으로 인해 클램핑력이 생성되며 예를 들어 상대 위치 변경의 결과로 크게 변경될 수 있습니다. 클램핑 메커니즘및 세부 사항(상대 회전, 접촉면의 분쇄 등). 부품 1의 고정은 클램핑 요소 2의 상대적인 움직임으로 수행되며 (대부분 나사 연결, 편심 등을 통해) 구성표 II - IV에서 필요한 클램핑력은 마찰 계수에 따라 다릅니다. 접촉면의. 방식 I에서 클램핑력은 링 3의 축방향 이동 중에 3개의 균등한 간격의 핀 2를 통해 도구 1에 전달됩니다. 공작물 1은 나사 4를 회전시켜 바이스의 캠 2와 3에 고정됩니다(다이어그램 II). 슬리브 1 부품 3의 구멍에 고정됩니다(그림 III)는 너트 4의 회전으로 인해 스페이서 슬리브 2의 방사상 이동으로 수행됩니다. 슬라이드 3(도식 IV)에 부품 Y의 고정은 축 방향으로 발생합니다 원추형 핀의 움직임 2.
강제 폐쇄가있는 메커니즘에서 클램핑 력은 외부 장치 (스프링, 유압 장치 등)에 의해 생성되며이 경우 실제로 설치된 부품 1의 치수 변동에 의존하지 않습니다 (그림 2).
공구 홀더 2에서 커터 1의 전원 차단(구성표 I), 척의 조 2에서 공작물 클램핑 1 선반(도식 II), 스톱 2에 의한 회전 면판 1(도식 III) 또는 유압 실린더 2에 의한 슬라이드 I(도식 IV)의 고정은 스프링, 수압 또는 공압을 사용하여 수행됩니다. 공작물 고정(Scheme II) 세 턱 척캠 4의 쐐기 모양의 표면과의 상호 작용으로 인해 공압 실린더 (다이어그램에 표시되지 않음)에서로드 3의 축 방향 이동으로 수행됩니다.
힘의 전달 방식에 따라 메커니즘이 구별됩니다. 직접적인 행동(도식 3) 및 레버 (도식 4), 레버 또는 쐐기 메커니즘을 사용하여 노동력이 증가합니다. 선삭 모듈의 터릿 홀더 2에 공구 블록 1을 고정하는 작업(구성표 3, I)은 콜릿 3의 축 방향 이동 중에 발생합니다. 절단 블록 1의 센터링은 삼각형 프로파일의 커플 링을 사용하여 수행됩니다. 맨드릴 2에서 공작물 I (Scheme II)의 회전은 너트 3이 조일 때 끝에 발생하는 마찰력으로 인해 제외됩니다. 턴테이블 1에 장착되고 일부 - 고정베이스 3) 오일 유압 실린더 4에 공급됩니다. 프레임 2(다이어그램 IV)에 썰매 I의 클램핑은 오일이 압력 하에서 원통형 단면을 얻는 경향이 있는 타원형 단면의 탄성 튜브 3에 공급될 때 수행됩니다 모양 .
맨드릴 1은 나사 4에 의해 움직이는 쐐기 3에 의해 스핀들 2(그림 4, D)에 고정됩니다. 봉재 2(그림 II)는 너트 3을 회전시켜 콜릿 U로 고정됩니다. 전면판 1(그림 III)은 모든 각도 위치에서 고정됩니다. 유압 실린더 3의 축 방향 이동 중 플레이트 2의 변형으로 인해. 레버 2를 사용할 때 썰매 1과 같은 부품의 클램핑 력 증가는 다이어그램 IV에 나와 있습니다.
하중의 특성에 따라 작동 중 횡력이 발생하는 메커니즘(도식 5)과 클램핑력이 균형을 이루는 자체 조정 메커니즘(도식 b)을 구별하는 것이 가능합니다. 첫 번째 경우 고정 요소의 변형이 발생하여 작업 위치에서 변위가 발생할 수 있습니다(노드의 위치 지정 정확도 등에 부정적인 영향을 미침). 구성표 5에서 연삭 휠 1(구성식 I), 몸체 Y(구성식 II), 퀼 U(구성식 III) 및 원통형 가이드 Y(구성식 IV)는 나사 메커니즘 2를 사용하여 고정됩니다.
다이어그램 6, I에서 공구 홀더 Y는 콜릿 3에서 맨드릴 Y로 전달되는 축력에 의해 스핀들 2에 고정됩니다. 일반적으로 콜릿의 축 방향 힘은 Belleville 스프링을 사용하여 생성됩니다(다이어그램에는 표시되지 않음). 원추형 맨드릴(3)에 원통형 부분(7)을 고정하는 것은 맨드릴(3)의 축방향 이동 중에 콜릿(2)의 도움으로 수행됩니다(방식 II). 플런저 1(구성표 III)은 축 방향 변형(플랜지 4) 중에 벨로우즈 부싱 2의 도움으로 베이스 3에 고정됩니다. 캐리지(도식 IV)는 캐리지에 연결된 클램프(1)에 의해 원통형 가이드(2)에 고정됩니다.
사용된 효과에 따라 클램핑 메커니즘이 구별될 수 있으며, 그 기능은 재료의 탄성(도식 7), 클램핑 메커니즘 부품의 이동성(도식 8) 및 기타 효과(도식 9)를 기반으로 합니다. 공구 홀더 1(그림 7.1)을 스핀들 3에 클램핑할 때 축 방향 이동 중에 발생하는 콜릿 2의 변형이 사용됩니다. 캠 3이 설치된 멤브레인 2의 변형으로 인해 선반에 직경 d가 d인 원통형 공작물 I의 고정(도식 II)이 수행됩니다. 트러니언 4가 화살표 방향과 멤브레인이 변형되면 공작물이 팽창하고 트러니언이 해제되면 멤브레인의 강성에 따라 힘으로 고정됩니다. 예를 들어, 스핀들 2와 같은 원통형 부품의 클램핑(구성 III)은 오일이 환형 챔버에 공급되고 얇은 벽으로 된 부싱 I이 변형될 때 수행할 수 있습니다.
그림 8.1에서 원통형 맨드릴 1 또는 이와 유사한 부품은 편심 2가 회전할 때 고정됩니다. 자가 센터링 3-죠 척에서 부품 I의 고정은 그림 II에 나와 있습니다. 부품 1은 중앙에 설치되고 클램프는 노치가 있는 작업 표면이 있는 편심 배치된 세 개의 세그먼트 2에 의해 수행됩니다. 토크가 증가하면 클램핑력이 자동으로 증가합니다. 구성표 III는 유압 실린더 2 및 3과 마찰 디스크 4를 사용하여 스핀들 1의 클램핑 메커니즘을 보여줍니다. 고정 변경 조 I in 선반 척도 2는 반응식 IV에 도시되어 있다. 캠(1)은 삼각형 프로파일 커플링(3)을 기반으로 하고 잠금 장치(5)가 이동될 때 로드(4)에 의해 고정된다.
계획 9.1에서 작업 공동에 형성된 진공은 맨드릴 1을 고정하는 데 사용됩니다. 힘의 값은 스프링 2로 조정할 수 있습니다. 전자석, 클램핑 플레이트 또는 영구 자석이 있는 플레이트는 종종 평면 연삭 중에 부품을 고정하는 데 사용됩니다. 다이어그램 II는 환형 극이 있는 자기 플레이트를 보여줍니다. 극판은 비자성체의 도움으로 북극과 남극으로 나뉘며 자석과 공작물 사이에 자기장을 생성하는 역할을 합니다. 계획 III에서 유압 베어링에 장착 된 스핀들 1을 고정하기 위해 액시얼 베어링 2가 사용되며 그 중 하나에서 이송이 중지됩니다 3 윤활유. 클램핑은 반대쪽 포켓의 오일 압력에 의해 수행됩니다.
스킴 IV는 베이스에 설치된 얇은 테이프(2)로 가동 유닛(1)이 어떻게 고정되는지를 보여준다. 전자석 3의 도움으로 어셈블리는 이동 가능한 어셈블리의 위치에 대한 클램핑 메커니즘의 영향 없이 필요한 위치에 고정됩니다(횡 방향에서 테이프 2의 낮은 강성으로 인해). 이것은 위치 정확도에 대한 클램핑 메커니즘의 영향을 제거합니다.
드라이브 유형에 따라 기계식(도식 10), 스프링(도식 11), 유압식 또는 공압식(도식 12) 및 전기 기계식(도식 13) 드라이브가 있는 클램핑 장치가 구별됩니다. 맨드릴 1은 구형 팁이 있는 균일한 간격의 나사 2로 고정됩니다(그림 10, I). 부품 1(Scheme II)은 로드 2의 축 방향 이동 중에 레버 시스템을 통해 고정됩니다. 방사형 드릴링 머신(Scheme III)의 기둥 1은 나사 3이 회전할 때 로드 2에 의해 고정됩니다. 모양의 표면. 공구 홀더는 삼각형 프로파일의 캠 클러치 2에 의해 슬라이더 중앙에 있습니다.
종종 스프링이 클램핑에 사용됩니다(도식 11). 도구 블록의 교체 가능한 부품 1(구성표 I)은 로드 3의 축 방향 이동 중에 선반 절단 헤드의 홀더 2에 고정됩니다(스프링의 작용하에). 이 경우, 원추형 부분이 있는 로드(3)는 블록의 교체 가능한 부분의 원추형 홈에 있는 경사 핀(4)을 통해 작용합니다. 블랭크 1(도식 11,11 Vi 12, II)의 클램핑은 유압 실린더 2를 사용하여 레버 3을 통해 수행되며, 이 힘은 스프링(도식 11, II) 또는 유압(도식 12, II)에 의해 발생합니다. . 스프링 2에 의한 음차 메커니즘의 변형으로 인해 페이스 플레이트 1 (구성 11, III)의 고정이 수행됩니다.
스프링과 쐐기 메커니즘의 도움으로 선반의 크로스바 1을 클램핑하는 것이 그림 11, IV에 나와 있습니다. 스프링 힘은 웨지 2를 통해 로드 3과 레버 4로 전달됩니다.
유압(공압)을 사용한 고정 부품은 그림 12에 나와 있습니다. 맨드릴 1(그림 I)은 오일이 닫힌 원통형 캐비티에 공급될 때 스핀들 2에 고정됩니다. 부품 3에 맞닿을 때 심압대 퀼 1(도식 III)의 고정은 퀼의 약화 섹션 2의 반경 방향 변형으로 인해 수행됩니다. 부품 1(또는 위성)은 유압 실린더 2와 회전 레버 3을 사용하여 고정됩니다(도식 IV).
클램핑 메커니즘의 전자기계식 드라이브(그림 13)는 큰 힘을 발생시키므로 치수가 증가합니다. 여기에는 일반적으로 나사 너트 변속기 형태로 만들어진 엔진 M과 액추에이터가 포함됩니다. 계획 / 고정 도구에서 제 분기추력 1의 축 방향 이동 중에 수행되며, 운동은 엔진 M에서 유성 기어 2와 너트 3을 통해 전달됩니다. 다이어그램 II에서 추력 1의 축 방향 이동 척공작물을 클램핑하는 것은 웜과 나사 기어를 통해 수행됩니다. 계획 III에서 샤프트 1은 하우징 2에 연결된 전자기 클러치 3에 의해 회전으로부터 고정됩니다.
수직 선반의 크로스바 1(도식 IV)의 전자기계식 클램핑은 모터 M에서 클램핑된 요소까지의 큰 기어비로 인해 예외적으로 큰 힘을 발생시킵니다.
무화과에. 3.70은 공작 기계의 스핀들 축을 따라 장착된 다양한 공구 클램핑 메커니즘을 보여줍니다. 다양한 유형. 무화과에. 3.70, 그리고 스핀들 2의 원추형 보어에 맨드릴 1의 고정은 Belleville 스프링 4 패키지에서 수행됩니다. 스프링의 한쪽 끝은 스핀들 끝에 맞닿고 다른 쪽 끝은 로드 5에 연결됩니다. (표시되지 않음). 로드(5)는 맨드릴의 섕크에 있는 콜릿(3)을 통해 작용하여 공구를 고정합니다. 언클램핑은 콜릿과 함께 로드(5)를 전방으로 이동시키는 유압 실린더(도시되지 않음)에 의해 수행되며, 그 결과 맨드릴의 원추형 생크가 해제됩니다. 대부분의 클램핑 메커니즘은 유사한 방식을 가지고 있습니다.

그림에 표시된 디자인에서 3.70, b에서 스프링 로드 4와 연결된 클램핑 슬리브 2는 볼 3을 통해 맨드릴 1에 힘을 전달합니다. 3.70, 맨드릴 1에서 볼 2를 통해 로드 3과 직접 상호 작용합니다. 콜릿 클램핑 메커니즘(그림 3.70, d)에서 로드 6, 콜릿의 꽃잎 3 및 7의 힘은 맨드릴 1에 전달됩니다. 나사로 조인 생크 2를 통해 위치) 슬리브 5와 꽃잎 3 및 7의 끝과 스프링 4의 작용으로 인해 발생합니다.
고려 된 메커니즘에서 클램핑 메커니즘의 오작동 (스프링 파손) 또는 도구 "픽업"을 배제하지 않는 특정 절단 조건 (예 : 절삭력의 제어되지 않은 증가로 인한), 축 방향 이동 및 파손이 가능합니다. 또한 큰 형체력을 확보하려면 Belleville 스프링을 직렬로 설치해야 하며 그 결과 스프링 끝단의 마찰로 인해 힘의 상당 부분이 손실됩니다.
무화과에. 3.71은 위에서 언급한 단점이 제외된 클램핑 메커니즘을 보여줍니다. 여기서, 스프링(1)으로부터의 상대적으로 작은 힘은 부싱(2,3,5)과 볼(4)의 원추형 표면을 통해 로드(6)(하부)로 전달된다. 기울기 각도 선택 원추형 표면(예를 들어, α ≈ 12°) 로드 6으로 전달될 때 스프링의 힘에 상응하는 증가를 제공하는 것이 가능합니다(5 - 6배). 동시에 축 방향 힘 F가 "추출"에 발생하면 각도 a가 마찰 각도에 가깝게 선택되기 때문에 막대 6에서 스프링 1로의 힘 전달 계수는 다음과 같이 추가로 증가합니다. 10배 이상. 따라서 메커니즘은 잠금 장치를 형성하고 어떤 영향에서도 축 방향으로 도구의 이동이 실제로 불가능합니다.
다양한 캠 구동 메커니즘이 있는 3-죠 선반 척에서 로커암 원리가 그림 1에서 사용됩니다. 3.72 가. 드로우 로드(미도시)에 나사로 고정된 슬리브(1)는 축이 카트리지 본체에 설치된 로커 암(2)과 상호 작용합니다. 캠(3) 베이스의 홈에 포함된 레버의 짧은 숄더는 레버를 반경 방향으로 이동시킵니다. 나사 4개의 클램핑 조(미도시)가 가동 조에 고정된다. 웨지 랙 척의 몸체에는 캠 3의 톱니와 맞물리는 톱니의 경사각이 작고 큰 3 쌍의 레일 4와 5가 각각 있습니다 (그림 3.72, b). 레일(4)은 부싱(2)에 연결되고 공작물을 클램핑 - 클램핑 해제하는 역할을 합니다. 레일(5)은 슬리브(1)에 연결되고 다른 가공 직경으로 전환할 때 클램핑 조의 위치를 변경하도록 설계되었습니다. 이를 위해 레일(4)이 캠에서 분리되고 레일(5)이 캠과 결합하여 캠을 이동할 수 있습니다. 부싱 1과 2는 모두 유압 실린더로 구동됩니다.


그림에 표시된 카트리지. 3.72, c는 캠으로 공작물 센터링(척킹 중)과 공작물 캠 자체 정렬(중앙에서 가공 시)을 제공합니다. 카트리지의 중심은 떠 있게 만들어집니다. 심압대 퀼로 공작물을 누르는 특정 힘으로 Belleville 스프링이 압축되고 중심이 움푹 들어가게 됩니다. 캠 베이스 2는 부싱 1이 움직일 때 쐐기 메커니즘에 의해 구동되며 로드로 유압 실린더에 연결됩니다(그림에는 표시되지 않음). 랙 및 피니언 캠이 있는 척에서 캠은 스핀들의 후방 끝에 장착된 유압 모터(그림 3.72, d)에 의해 구동됩니다(그림에는 표시되지 않음). 유압 모터(그림 II)의 로터 1은 부싱 2(그림 I)와 기어 휠 3에 연결됩니다. 유압 모터가 오른쪽(각도 φ p)으로 회전하면 쐐기 4가 나선형으로 랙은 교환 가능한 죠(5)의 나사와 맞물려 반경 방향으로 이동하고 공작물을 클램핑하게 합니다. 유압 모터 로터를 왼쪽(φ cm 각도)으로 돌리면 랙의 쐐기가 캠의 나선형 절단부에서 분리되어 풀어집니다. 그 후, 조는 주어진 직경으로 수동으로 재설정될 수 있습니다.
선반의 클램핑 부품(캠 드라이브)용 유압 실린더에서 캠 드라이브의 추력 I에 힘을 전달하는 유압 실린더 3(그림 3.73)은 스핀들 회전 드라이브의 풀리 2에 설치됩니다. 웨이트 4는 불균형을 줄이기 위해 제공되며 오일은 스풀 5를 통해 유압 실린더에 공급됩니다.
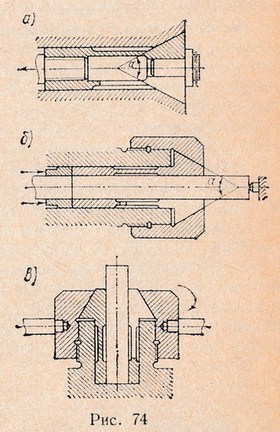
크랭크 샤프트 고정용 3 턱 척에서 크랭크 샤프트 1은 센터 6에 설치되고 슬리브 5와 관련된 피스톤 4의 축 방향 이동 중에 쐐기 메커니즘 3을 사용하여 캠 2에 의해 고정됩니다(그림 3.74). 체결 및 해제는 유압실린더(미도시)에 의해 이루어진다.
자체 정렬 직접 작동 클램프는 클램프 방향으로 유연한 꽃잎 2와 3으로 인해 노드 I에 가해지는 가로 하중을 방지합니다(그림 3.75, a). 그림 3.75, b에 표시된 클램프는 고정 노드 3에서 레버 2로 인해 메커니즘의 벨빌 스프링 1에 의해 발생하는 힘을 크게 증가시킬 수 있습니다.
클램핑 요소는 공작물을 클램핑하거나 보다 복잡한 클램핑 시스템에서 중간 링크를 클램핑하는 데 직접 사용되는 메커니즘입니다.
가장 단순한 종류 범용 클램프그것들에 장착된 키, 핸들 또는 핸드휠을 작동시키는 것입니다.
클램핑 된 공작물의 움직임과 나사에서 움푹 들어간 곳의 형성을 방지하고 축에 수직이 아닌 표면을 누를 때 나사의 굽힘을 줄이기 위해 흔들 신발이 끝 부분에 배치됩니다. 나사(그림 68, α).
조합 나사 장치레버 또는 쐐기로 불립니다 콤비네이션 클램프그리고 다양한 나사 클램프(그림 68, b), 클램핑 장치를 사용하여 고정 장치에 공작물을 보다 편리하게 설치할 수 있도록 이동 또는 회전할 수 있습니다.
무화과에. 69 일부 디자인 표시 퀵 릴리스 클램프. 작은 클램핑 힘의 경우 총검 장치(그림 69, α)가 사용되며 상당한 힘의 경우 플런저 장치(그림 69, b)가 사용됩니다. 이 장치를 사용하면 클램핑 요소를 공작물에서 멀리 후퇴시킬 수 있습니다. 고정은 특정 각도로 막대를 회전시킨 결과 발생합니다. 폴딩 스톱이 있는 클램프의 예가 그림 1에 나와 있습니다. 69, 다. 너트 핸들 2를 풀면 스톱 3이 수축되어 축을 중심으로 회전합니다.그 후, 클램핑 로드 1은 거리 h만큼 오른쪽으로 후퇴합니다. 무화과에. 도 69의 d는 고속 레버형 장치를 나타낸 도면이다. 핸들 4를 돌리면 핀 5가 비스듬한 절단으로 바 6을 따라 미끄러지고 핀 2는 공작물 1을 따라 미끄러져 아래에있는 정지 장치에 대고 누릅니다. 구형 와셔(3)는 힌지 역할을 합니다.

공작물을 클램핑하는 데 필요한 많은 시간과 상당한 힘은 나사 클램프의 범위를 제한하며 대부분의 경우 신속하게 작동하는 클램프를 선호합니다. 편심 클램프. 무화과에. 70은 L자형 클램프(b)와 원추형 부동(c) 클램프가 있는 원통형 디스크(α)를 보여줍니다.
편심은 둥글고 나선형이며 나선형입니다(아르키메데스의 나선에 따라). 클램핑 장치에는 원형과 곡선의 두 가지 유형의 편심이 사용됩니다.
라운드 편심(그림 71)은 편심도 e의 크기만큼 회전축이 이동된 디스크 또는 롤러입니다. 자체 제동 조건은 D/e≥ 4의 비율로 보장됩니다.
원형 편심의 장점은 제조의 용이성에 있습니다. 주요 단점은 앙각 α와 클램핑력 Q의 불일치입니다. 곡선 편심, 인벌 류트 또는 아르키메데스의 나선을 따라 수행되는 작업 프로파일은 일정한 고도각 α를 가지므로 프로파일의 임의의 지점을 클램핑 할 때 힘 Q의 일정성을 보장합니다.

쐐기 메커니즘복잡한 클램핑 시스템에서 중간 링크로 사용됩니다. 제조가 쉽고 장치에 쉽게 배치되어 전달되는 힘의 방향을 늘리고 변경할 수 있습니다. 특정 각도에서 쐐기 메커니즘은 자체 제동 특성을 갖습니다. 단면 쐐기(그림 72, a)의 경우 힘이 직각으로 전달될 때 다음 종속성을 취할 수 있습니다. (ϕ1 = ϕ2 = ϕ3 = ϕ의 경우, 여기서 ϕ1…ϕ3은 마찰각임):
P = Qtg(α ± 2ϕ),
어디서 P - 축력; Q - 클램핑력. 자가 제동은 α에서 발생합니다.<ϕ1 + ϕ2.
![]()
이중 경사 쐐기(그림 72, b)의 경우 각도 β> 90에서 힘을 전달할 때 일정한 마찰각에서 P와 Q 사이의 관계(ϕ1 = ϕ2 = ϕ3 = ϕ) 는 다음 공식으로 표현됩니다.
P = Qsin(α + 2ϕ)/cos(90° + α - β + 2ϕ).
레버 클램프다른 기본 클램프와 함께 사용하여 더 복잡한 클램핑 시스템을 형성합니다. 레버를 사용하여 전달되는 힘의 크기와 방향을 변경할 수 있을 뿐만 아니라 두 곳에서 동시에 공작물을 균일하게 클램핑할 수 있습니다. 무화과에. 73은 1-암 및 2-암 직선 및 곡선 클램프에서 힘의 작용 다이어그램을 보여줍니다. 이러한 레버 메커니즘에 대한 평형 방정식은 다음과 같습니다. 한쪽 어깨 클램프용(그림 73, α):

직접 두 어깨 클램프(그림 73, b):

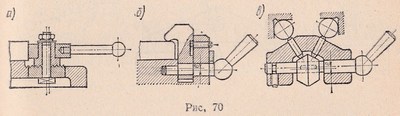
곡선형 클램프(l1용 여기서 p는 마찰각입니다. ƒ - 마찰 계수. 센터링 클램핑 요소는 콜릿, 확장 맨드릴, 하이드로플라스틱이 있는 클램핑 슬리브 및 멤브레인 카트리지와 같은 회전체의 외부 또는 내부 표면용 장착 요소로 사용됩니다. 압축 슬리브의 테이퍼 각도는 콜릿의 테이퍼 각도보다 1° 작거나 커집니다. 콜릿은 0.02 ... 0.05 mm 이하의 설치 편심(런아웃)을 제공합니다. 공작물의 베이스 표면은 9 ... 7 등급 정확도에 따라 가공되어야 합니다. 확장 맨드릴다양한 디자인(수성 플라스틱을 사용한 디자인 포함)은 클램핑 고정 장치로 분류됩니다. 다이어프램 카트리지외부 또는 내부 원통형 표면에서 공작물의 정확한 센터링에 사용됩니다. 카트리지 (그림 75)는 대칭으로 위치한 돌출 캠 2가있는 판 형태로 기계의 전면 판에 나사로 고정 된 원형 멤브레인 1로 구성되며 그 수는 6 ... 12의 범위에서 선택됩니다. 4개의 공압 실린더 로드가 스핀들 내부를 통과합니다. 공압 장치가 켜지면 멤브레인이 구부러져 캠이 떨어져 나옵니다. 막대가 뒤로 이동하면 멤브레인이 원래 위치로 돌아가려고 캠으로 공작물 3을 압축합니다. 랙 및 피니언 클램프(그림 76)은 랙 3, 샤프트 4에 있는 기어 휠 5, 핸들 레버 6으로 구성됩니다. 핸들을 시계 반대 방향으로 돌려 랙과 클램프 2를 낮추어 공작물 1을 고정합니다. 클램핑력 Q는 다음과 같습니다. 손잡이에 가해지는 힘 P의 값. 이 장치에는 잠금 장치가 장착되어 있어 시스템을 방해하여 바퀴가 뒤로 돌아가는 것을 방지합니다. 가장 일반적인 유형의 잠금은 다음과 같습니다. 롤러 잠금(그림 77, a) 롤러의 절단면과 접촉하는 롤러 1용 절단부가 있는 구동 링 3으로 구성됩니다. 2 기어. 구동 링(3)은 클램핑 장치의 핸들에 고정됩니다. 핸들을 화살표 방향으로 돌리면 회전이 롤러 1*을 통해 기어 샤프트에 전달됩니다. 롤러는 하우징(4)의 보어 표면과 롤러(2)의 절단면 사이에 끼워져 역회전을 방지한다. 다이렉트 드라이브 롤러 잠금드라이버에서 롤러까지의 모멘트는 그림에 나와 있습니다. 77b. 핸들에서 가죽끈을 통한 회전은 휠의 샤프트(6)에 직접 전달됩니다. 롤러 3은 약한 스프링 5에 의해 핀 4를 통해 눌려집니다. 롤러와 링 1과 샤프트 6이 접촉하는 지점의 간격이 선택되기 때문에 핸들 2에서 힘이 제거되면 시스템이 즉시 쐐기로 고정됩니다. 핸들을 돌림으로써 반대 방향으로 롤러가 쐐기를 박고 샤프트를 시계 방향으로 회전시킵니다. 원추형 자물쇠(그림 77, c)에는 원추형 슬리브 1과 원뿔형 3과 핸들 4가 있는 샤프트가 있습니다. 샤프트의 중간 목에 있는 나선형 톱니는 레일 5와 맞물립니다. 후자는 작동 클램핑 메커니즘에 연결됩니다 . 톱니의 경사각이 45°일 때 샤프트(2)의 축방향 힘은 클램핑력과 동일합니다(마찰 제외). * 이 유형의 잠금 장치는 120° 각도로 위치한 3개의 롤러로 만들어집니다. 결합된 클램핑 장치다양한 유형의 기본 클램프의 조합입니다. 그들은 클램핑 력을 높이고 장치의 치수를 줄이며 관리를 가장 쉽게 만드는 데 사용됩니다. 결합된 클램핑 장치는 여러 위치에서 공작물을 동시에 클램핑할 수도 있습니다. 결합 된 클램프의 유형이 그림에 나와 있습니다. 78. 곡선 레버와 나사의 조합 (그림 78, a)을 사용하면 두 곳에서 동시에 공작물을 고정하여 클램핑 력을 미리 결정된 값으로 균등하게 증가시킬 수 있습니다. 일반적인 회전 클램프(그림 78, b)는 레버와 나사 클램프의 조합입니다.레버(2)의 스윙 축은 와셔(1)의 구면의 중심과 정렬되어 핀(3)을 굽힘력으로부터 풀어준다. 특정 레버 암 비율로 레버의 클램핑 끝단의 클램핑력 또는 스트로크를 증가시킬 수 있습니다. 무화과에. 도 78의 d는 캡 레버에 의해 프리즘에 원통형 공작물을 고정하기 위한 장치를 나타내고, 도 78에서는. 도 78, d는 클램핑력이 비스듬히 가해지기 때문에 고정 지지대에 공작물의 측면 및 수직 가압을 제공하는 신속 작동 결합 클램프(레버 및 편심)의 다이어그램입니다. 유사한 조건이 그림 1에 표시된 장치에 의해 제공됩니다. 78, e. 토글 클램프(그림 78, g, h 및)는 핸들을 돌려 구동되는 신속하게 작동하는 클램핑 장치의 예입니다. 자체 분리를 방지하기 위해 핸들은 멈출 때까지 데드 위치를 통해 이동됩니다. 2. 클램핑 힘은 시스템의 변형과 강성에 따라 다릅니다. 시스템의 원하는 변형은 조임 나사 1을 조정하여 설정됩니다. 그러나 크기 H(그림 78, g)에 대한 허용 오차가 있다고 해서 지정된 배치의 모든 공작물에 대한 고정력이 일정하지는 않습니다. 결합된 클램핑 장치는 수동으로 또는 전원 장치에서 작동됩니다. 여러 고정 장치용 클램핑 메커니즘모든 위치에서 동일한 클램핑력을 제공해야 합니다. 가장 간단한 다중 장소 장치는 맨드릴로, 블랭크 "링, 디스크" 패키지가 설치되고 끝면을 따라 하나의 너트로 고정됩니다(직렬 클램핑 힘 전달 방식). 무화과에. 도 79, α는 평행한 형체력 분포의 원리에 따라 작동하는 형체 장치의 예를 보여준다. 베이스와 가공된 표면의 동심도를 보장하고 공작물의 변형을 방지해야 하는 경우 탄성 클램핑 장치가 사용되며, 여기서 클램핑력은 필러 또는 기타 중간 몸체를 통해 고정물의 클램핑 요소에 균일하게 전달됩니다. 탄성 변형의 한계 내에서). 기존의 스프링, 고무 또는 수성 플라스틱이 중간체로 사용됩니다. 유압 플라스틱을 사용하는 병렬 동작 클램핑 장치가 그림 1에 나와 있습니다. 79b. 무화과에. 도 79에는 혼합(병렬-직렬) 작용의 장치가 도시되어 있다. 연속 기계에서 (드럼 밀링, 특수 멀티 스핀들 드릴링)피드 이동을 중단하지 않고 공작물을 설치 및 제거합니다. 보조 시간이 기계 시간과 겹치면 다양한 유형의 클램핑 장치를 사용하여 공작물을 고정할 수 있습니다. 생산 공정을 기계화하려면 다음을 사용하는 것이 좋습니다. 자동화 유형의 클램핑 장치(연속 동작), 기계의 공급 메커니즘에 의해 구동됩니다. 무화과에. 80, α는 끝면을 처리할 때 드럼 밀링 머신에 원통형 공작물 2를 고정하기 위한 유연한 폐쇄 요소 1(케이블, 체인)이 있는 장치의 다이어그램을 보여줍니다. 도 80, 6은 다중 스핀들 수평 드릴링 머신에서 피스톤 블랭크를 고정하기 위한 장치의 다이어그램이다. 두 장치 모두 작업자가 공작물을 설치 및 제거하기만 하면 공작물의 클램핑이 자동으로 발생합니다. 마무리 또는 마무리 중에 얇은 시트 공작물을 고정하기 위한 효과적인 클램핑 장치는 진공 클램프입니다. 조임력은 다음 공식에 의해 결정됩니다. 여기서 A는 씰에 의해 제한된 장치 공동의 활성 영역입니다. p= 10 5 Pa - 대기압과 공기가 제거되는 장치의 공동 압력의 차이. 전자기 클램핑 장치평평한 바닥 표면을 가진 강철 및 주철로 만든 공작물을 고정하는 데 사용됩니다. 클램핑 장치는 일반적으로 플레이트 및 카트리지 형태로 만들어지며, 설계에서 공작물의 치수 및 구성, 두께, 재료 및 필요한 유지력이 초기 데이터로 사용됩니다. 전자기 장치의 유지력은 공작물의 두께에 크게 좌우됩니다. 얇은 두께에서는 모든 자속이 부품의 단면을 통과하지 않고 자속선의 일부가 주변 공간으로 산란됩니다. 전자기 판 또는 카트리지에서 처리된 부품은 잔류 자기 특성을 획득합니다. 즉, 교류로 구동되는 솔레노이드를 통과시켜 자기를 제거합니다. 부품의 설치, 정렬 및 클램핑 시간을 줄이려면 특수(이 부품 처리용으로 설계된) 클램핑 장치를 사용하는 것이 좋습니다. 동일한 부품을 대량으로 제조할 때는 특수 장치를 사용하는 것이 특히 좋습니다. 지그는 공작물을 빠르고 안정적으로 고정해야 하므로 하나의 공작물을 여러 위치에 동시에 클램핑할 때 이러한 클램프를 사용하는 것이 좋습니다. 하 무화과. 74는 두 개의 클램프에 의해 클램핑이 동시에 수행되는 본체 부품용 클램핑 장치를 보여줍니다. 1
그리고 6
하나의 너트를 조여 부품의 양쪽에 5
. 너트를 조일 때 5
핀 4
, 다이에 이중 경사가 있음 7
, 견인을 통해 8
다이의 경사에 영향을 미칩니다 9
그리고 너트로 조여줍니다 2
고집 1
핀에 앉아 3
. 조임력의 방향은 화살표로 표시됩니다. 너트를 풀 때 5
클램프 아래에 배치된 스프링 1
그리고 비, 들어올려 항목을 해제합니다. 단일 클램핑 고정구는 큰 부품에 사용되는 반면 작은 부품의 경우 여러 공작물을 동시에 장착하고 고정할 수 있는 고정구를 사용하는 것이 좋습니다. 이러한 장치를 다중 시트라고 합니다. 하나의 클램프로 여러 개의 공작물을 고정하면 고정 시간이 단축되고 여러 곳의 지그 작업에 사용됩니다. 무화과에. 76은 공압 피스톤 동력 구동 장치가 있는 다중 시트 장치를 보여줍니다. 압축 공기는 3방향 밸브를 통해 실린더의 상부 캐비티로 들어가 공작물을 클램핑하거나(클램프력의 방향은 화살표로 표시됨) 실린더의 하부 캐비티로 들어가 공작물을 해제합니다. 설명 된 장치에서는 부품을 설치하는 카세트 방법이 사용됩니다. 여러 공작물(예: 이 경우 5개)이 카세트에 배치되고 동일한 공작물의 다른 배치가 이미 카세트에서 처리되고 있습니다. 처리가 완료되면 밀링된 부품이 있는 첫 번째 카세트가 장치에서 제거되고 대신 블랭크가 있는 다른 카세트가 설치됩니다. 카세트 방식을 사용하면 블랭크 설치 시간을 줄일 수 있습니다. 클램핑 장치 유형을 선택할 때 다음 규칙을 따라야 합니다. 이송 및 좌회전에 대해 밀링할 때 원통형 커터조임력은 그림과 같이 지시되어야 합니다. 78, a 및 오른쪽 회전 - 그림과 같이. 78b. 1. 공작물을 기계 테이블에 직접 고정할 때 어떤 장치를 사용합니까? 콜릿분할 스프링 슬리브이며 그 디자인 변형이 그림에 나와 있습니다. 74(α - 장력 튜브 포함, 6 - 스페이서 튜브 포함, in - 수직 유형). U10A와 같은 고탄소강으로 만들어지며 클램핑에서 경도 HRC 58...62, 테일 부분에서 경도 HRC 40...44로 열처리됩니다. 콜릿 테이퍼 각도 α = 30…40°. 더 작은 각도에서는 콜릿 걸림이 가능합니다.
 편심 자물쇠(그림 77, d) 편심 3이 쐐기로 고정 된 휠 샤프트 2로 구성되며 샤프트는 잠금 핸들에 고정 된 링 1에 의해 구동됩니다. 링은 몸체 보어 4에서 회전하며 축은 거리 e만큼 샤프트 축에서 오프셋됩니다. 핸들이 뒤로 회전하면 핀 5를 통해 샤프트로 전달됩니다. 고정 과정에서 링 1은 편심과 본체 사이에 끼어 있습니다.
편심 자물쇠(그림 77, d) 편심 3이 쐐기로 고정 된 휠 샤프트 2로 구성되며 샤프트는 잠금 핸들에 고정 된 링 1에 의해 구동됩니다. 링은 몸체 보어 4에서 회전하며 축은 거리 e만큼 샤프트 축에서 오프셋됩니다. 핸들이 뒤로 회전하면 핀 5를 통해 샤프트로 전달됩니다. 고정 과정에서 링 1은 편심과 본체 사이에 끼어 있습니다.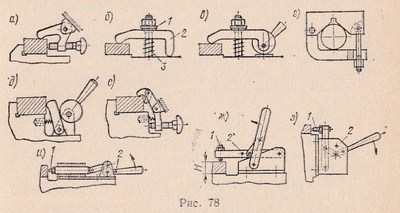

특수 클램핑 장치에는 나사, 편심, 공압, 유압 또는 공압 클램핑이 있습니다.단일 고정 장치의 계획

여러 비품
무화과에. 75는 키홈을 밀링할 때 2개의 롤러를 클램핑하기 위한 이중 고정구의 다이어그램입니다. 클램프는 손잡이로 만들어져 있습니다 4
클램프를 동시에 누르는 편심으로 3
그리고 견인을 통해 5
붙이기 위해 1
, 이에 의해 두 공작물을 본체의 프리즘에 누르십시오. 2
비품. 핸들을 돌리면 롤러가 풀립니다. 4
반전. 동시에, 스프링 6
그립을 뒤로 당겨 1
그리고 3
.
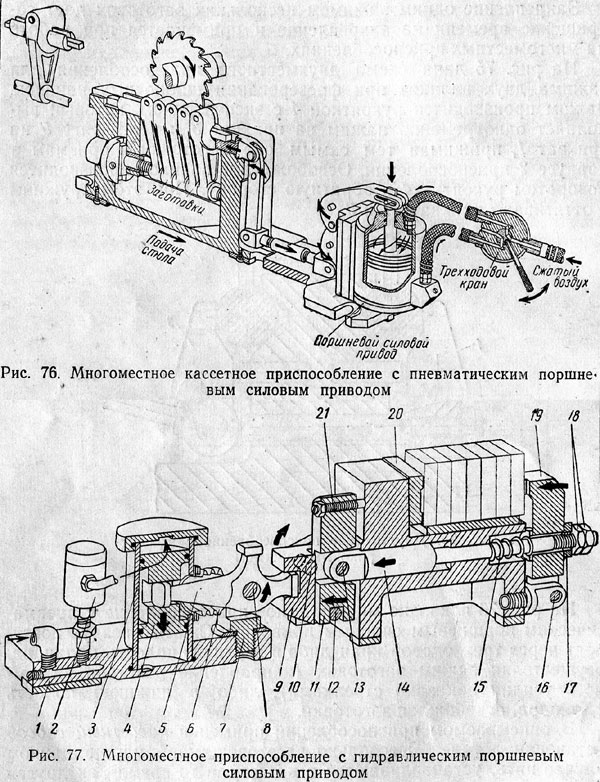
무화과에. 77은 유압 드라이브가 있는 다중 위치 클램핑 장치의 설계를 보여줍니다.
베이스 1
드라이브는 기계 테이블에 고정되어 있습니다. 실린더에 3
피스톤이 움직인다 4
, 레버가 설치된 홈에 5
, 축을 중심으로 회전 8
, 눈에 고정 7
. 5의 레버 암 비율은 3:1이며, 오일 압력은 50입니다. kg / cm 2피스톤 직경 55 mm레버 암의 짧은 끝에 힘 5
2800에 도달 킬로그램. 칩으로부터 보호하기 위해 천 케이스(6)가 레버에 놓입니다.
오일은 3방향 제어 밸브를 통해 밸브로 흐릅니다. 2
실린더의 상부 공동으로 더 3
. 베이스의 구멍을 통해 실린더의 반대쪽 캐비티에서 오일 1
삼방 밸브로 들어간 다음 배수구로 들어갑니다.
삼방 밸브의 핸들을 클램핑 위치로 돌리면 압축된 오일이 피스톤에 작용합니다. 4
, 레버를 통해 클램핑력 전달 5
포크 레버 9
두 개의 액슬 샤프트에서 회전하는 클램핑 장치 10
. 손가락 12
, 레버 9로 눌러 레버를 돌립니다. 11
나사의 접촉점에 대해 21
고정 장치 본체와 함께. 동시에 축 13
레버가 막대를 움직입니다 14
왼쪽으로 그리고 구형 와셔를 통해 17
견과류 18
클램핑 힘을 클램프로 전달 19
, 축을 중심으로 회전 16
고정 턱에 공작물을 누르는 단계 20
. 클램핑 크기의 조정은 너트로 수행됩니다. 18
그리고 나사 21
.
삼방 밸브의 핸들을 열림 위치로 돌리면 레버가 11
반대 방향으로 회전하여 추력을 움직입니다. 14
오른쪽으로. 이와 동시에 봄 15
막대기를 제거 19
공백에서.
최근에는 4-6의 압력으로 공장 네트워크에서 나오는 압축 공기가 사용되는 공압식 클램핑 장치가 사용되었습니다. kg / cm 2유압 실린더의 피스톤을 눌러 약 40-80의 오일 압력을 생성합니다. kg / cm 2. 이 압력의 오일은 클램핑 장치를 사용하여 많은 노력으로 공작물을 고정합니다.
작동 유체의 압력을 높이면 동일한 조임력으로 바이스 드라이브의 크기를 줄일 수 있습니다.클램핑 장치 선택 규칙
클램프는 간단하고 신속하게 작동하며 쉽게 접근할 수 있어야 하며 충분히 단단해야 하며 커터의 동작, 기계의 진동 또는 임의적 원인의 영향으로 자발적으로 풀리지 않아야 하며 공작물 표면이 변형되지 않아야 하며, 스프링백을 유발합니다. 클램프의 클램핑력은 지지대에 의해 반대되며 가능하면 가공 중 지지 표면에 대해 공작물을 누르는 데 도움이 되는 방식으로 지정되어야 합니다. 이를 위해서는 밀링 과정에서 발생하는 절삭력이 고정된 바이스 죠와 같은 고정부의 고정 부품에 감지될 수 있도록 클램핑 고정구를 머신 테이블에 설치해야 한다.
무화과에. 78은 클램핑 장치의 설치 다이어그램을 보여줍니다.
페이스 밀로 밀링할 때 이송 방향에 따라 그림과 같이 클램핑력이 향해야 합니다. 78, 또는 그림. 78, 시
고정 장치의 이러한 배열을 사용하면 단단한 지지대가 클램핑력에 반대되고 절단력은 가공 중에 지지 표면에 대해 공작물을 누르는 데 도움이 됩니다.통제 질문
2. 코너플레이트(각도)란 무엇이며 언제 사용되나요?
3. 프리즘은 어떤 공작물을 고정하기 위해 사용됩니까?










혼합 성격 장애: 원인, 증상, 유형 및 치료
GTA 4 컨트롤 설정
GTA 온라인 밀수에 대한 FAQ
LPDFR - 경찰에 오신 것을 환영합니다
Grand Theft Auto San Andreas의 거대한 지도와 그 비밀